2022. 12. 7. 17:01ㆍ딥러닝/딥러닝 모델
# my github: https://github.com/withAnewWorld/models_from_scratch
# my blog
# https://self-deeplearning.blogspot.com/
# https://self-deeplearning.tistory.com/
import torch
import torch.nn as nn
import torch.nn.functional as F
Ref¶
paper: https://arxiv.org/abs/1409.4842
ref(how to make GoogLeNet with PyTorch, youtuber: Aladdin Persson):
https://www.youtube.com/watch?v=uQc4Fs7yx5I&list=PLhhyoLH6IjfxeoooqP9rhU3HJIAVAJ3Vz&index=18
(GoogLeNet 설명(한글))
https://phil-baek.tistory.com/entry/3-GoogLeNet-Going-deeper-with-convolutions-%EB%85%BC%EB%AC%B8-%EB%A6%AC%EB%B7%B0
(Auxiliary classifiers)
http://datacrew.tech/inception-v1-2014/
목차¶
- GoogLeNet 의의 & 탄생배경
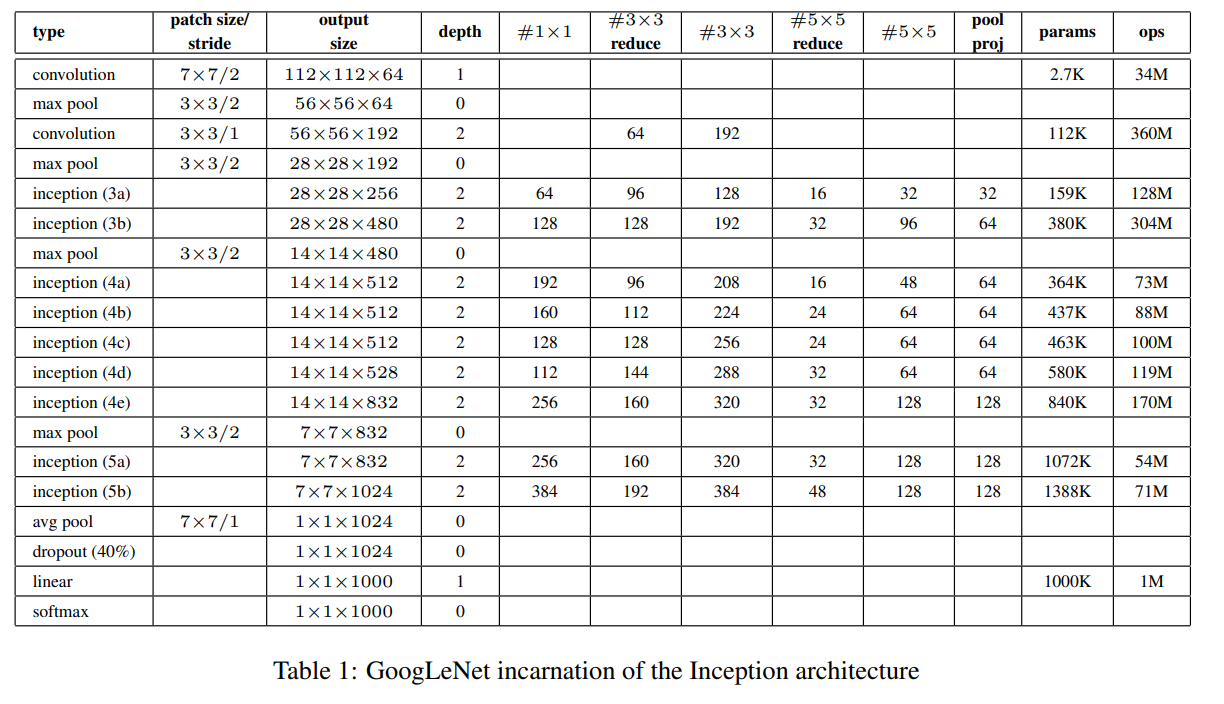
- GoogLeNet architecture
GoogLeNet(InceptionNet)¶
"We need to go deeper" (2010, inception)
의의: 효율적이면서 성능이 뛰어난 deep learning model 개발 시발점
탄생배경
conv net의 성능을 올리는 일반적인 방법은 2가지가 있습니다.
1) increase the depth(level)
2) increase the width(각 level의 unit)
해당 방법들의 문제점
1) overfitting(과적합)
2) 급격히 증가하는 computational resources
- overfitting: model이 train data에 과도하게 최적화되어 test data에 대해서 낮은 성능을 보이는 case
사람에게 비유하면 한 학생이 책에 있는 문제를 모두 외워서 책에 있는 문제는 잘 풀지만 처음 보는 문제(시험)에서는 낮은 점수를 받는 것과 비슷한 경우
(적절한 학습이 이루어지지 않았다는 반증)
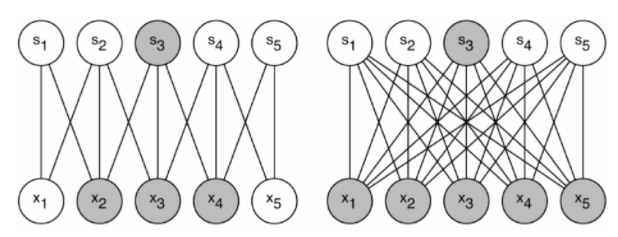
위의 문제를 근본적으로 풀기 위해서는 fully connected layer에서 sparsely connected layer로 변환해야 합니다.
하지만, computer 구조상 non-uniform sparsely data를 다루는 데에 비효율적이므로 이를 적용하기 어렵습니다.
sparse 매트릭스를 clustering(묶어서), 상대적으로 dense한 submatricies로 변환하여 계산하는 것이 sparse matrix 연산 논문에서 좋은 성능을 보이는 것이 입증되어왔습니다.
해당 아이디어를 따와서 conv net에 적용
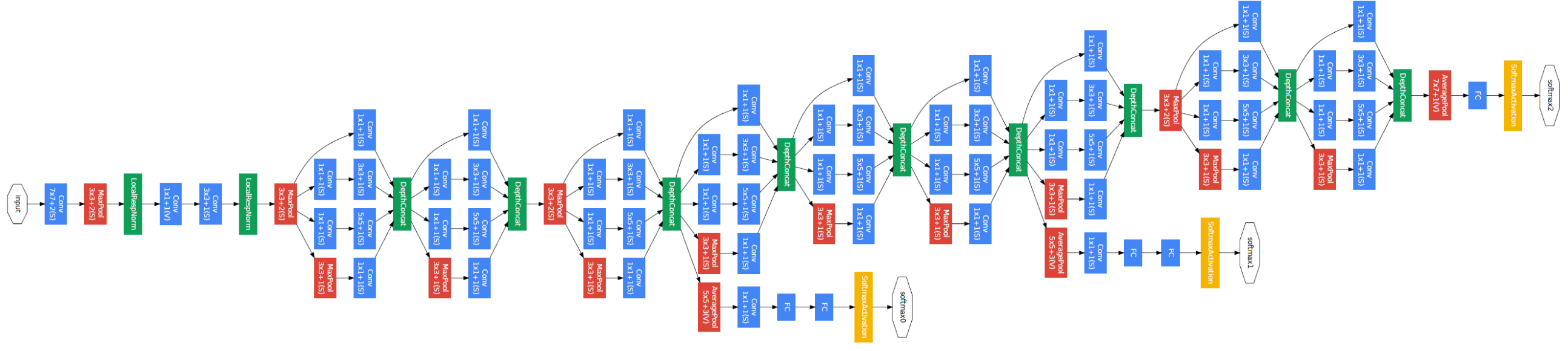
GoogLeNet의 전체 구조는 inception module이라 불리는 block이 반복되어 layer를 쌓아나가는 구조입니다.
그러면 pseudo code로 Inception module을 만들어 보겠습니다.
class InceptionModule(nn.Module):
def __init__(self):
self.conv1 = nn.Conv2d(in_channels,
out_channels,
kernel_size = (1, 1),
stride = 1) # 가장 왼쪽 conv net
self.conv_3x3 = nn.Sequential(nn.Conv2d(kernel_size = (1, 1),
stride = 1),
nn.Conv2d(kernel_size = (3, 3),
stride = 1,
padding = 1))
self.conv_5x5 = nn.Sequential(nn.Conv2d(kernel_size = (1, 1),
stride= 1,),
nn.Conv2d(kernel_size = (5, 5),
stride =1,
padding = 2)
self.projection = nn.Sequential(nn.MaxPool2d(),
nn.Conv2d(in_channels,
out_channels,
kernel_size = (1, 1),
stride = 1) # 가장 오른쪽 layer
def forward(self, x):
out1 = self.conv1(x)
out2 = self.conv_3x3(x)
...
return concat(outs, dim = filter)
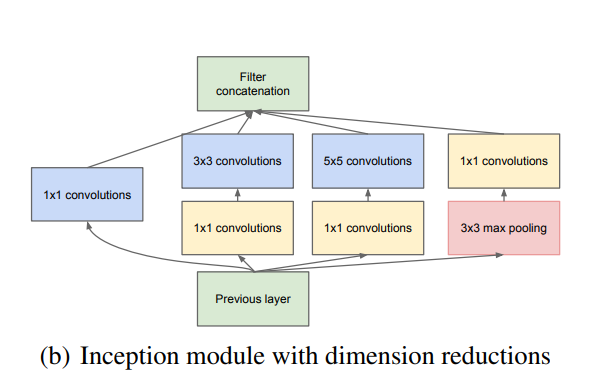
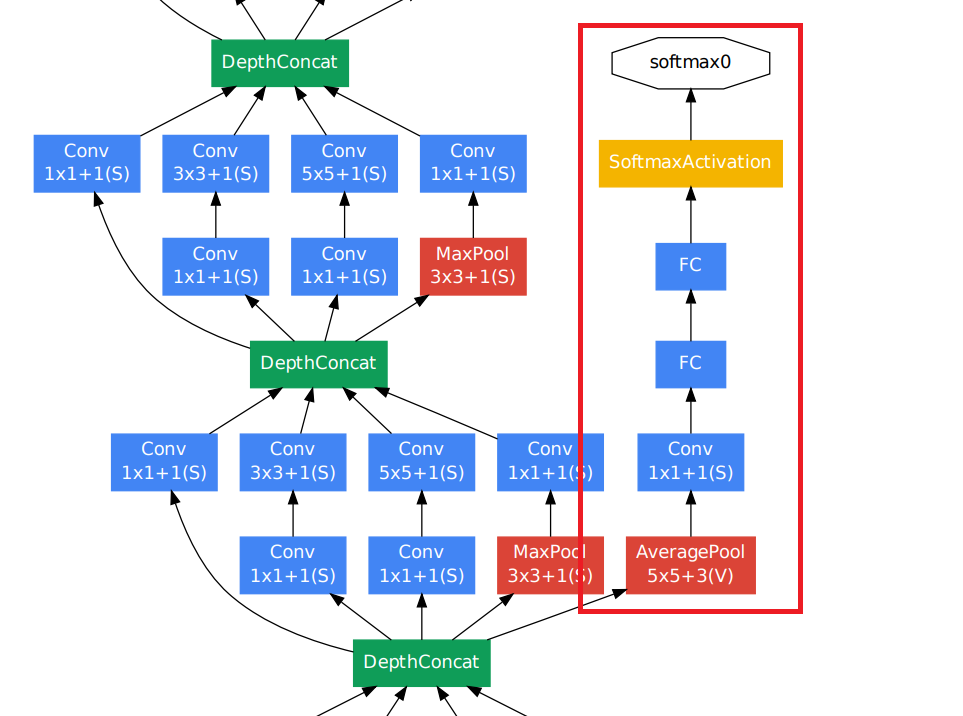
위의 GoogLeNet architecture image를 자세히 보시면 중간에 튀어나온 module을 확인하실 수 있습니다.
해당 module은 깊이가 매우 깊어지는 architecture의 경우 gradient vanishing/exploding이 발생하여 model의 성능을 떨어뜨릴 수 있기 때문에 중간마다 역전파를 계속 전달해주는 역할을 합니다.
단, test 시에는 해당 모듈을 사용하지 않고 output을 도출합니다.
# pseudo code
class AuxiliaryClassifier(nn.Module):
def __init__(self):
self.auxiliary_classifier = nn.Sequential(nn.AvgPool2d(),
nn.Conv2d(kernel_size = (1,1),
stride = 1),
nn.Linear(),
nn.Linear(),
nn.Softmax())
def forward(self, x)
return self.auxiliary_classifier(x)
#pseudo code
class GoogLeNet(nn.Module):
def __init__():
self.conv = nn.Conv2d()
self.pool = nn.MaxPool2d()
self.inception_3a = inception_module()
...
self.classifier_1 = auxiliary_classifier()
self.classifier_2 = auxiliary_classifier()
...
self.fc = nn.Sequential(nn.AvgPool2d(),
nn.DropOut(),
nn.Flatten(),
nn.Linear(),
nn.Softmax())
def forward(self, x)
out_1 = self.classifier_1(blocks(x))
out_2 = self.classifier_2(blocks(x))
out_3 = self.fc(blocks(x))
return out_1, out_2, out_3
Let's make GoogLeNet¶
순서
1) inception module
2) auxiliary_classifier
3) GoogLeNet
class InceptionModule(nn.Module):
def __init__(self,
in_channels,
reduce_3_out,
reduce_5_out,
conv_1_out,
conv_3_out,
conv_5_out,
proj_out):
super(InceptionModule, self).__init__()
self.reduce_3 = nn.Conv2d(in_channels = in_channels,
out_channels = reduce_3_out,
kernel_size = (1, 1),
stride = 1)
self.conv_3 = nn.Conv2d(in_channels = reduce_3_out,
out_channels = conv_3_out,
kernel_size = (3, 3),
stride = 1,
padding = 1)
self.reduce_5 = nn.Conv2d(in_channels = in_channels,
out_channels = reduce_5_out,
kernel_size = (1, 1),
stride = 1)
self.conv_5 = nn.Conv2d(in_channels = reduce_5_out,
out_channels = conv_5_out,
kernel_size =(5, 5),
stride = 1,
padding = 2)
self.pool = nn.MaxPool2d(kernel_size = (3, 3),
stride = (1, 1),
padding = 1)
self.proj = nn.Conv2d(in_channels = in_channels,
out_channels = proj_out,
kernel_size = (1, 1),
stride = 1)
self.conv_1 = nn.Conv2d(in_channels = in_channels,
out_channels = conv_1_out,
kernel_size = (1, 1),
stride = 1)
def forward(self, x):
'''
inputs:
- previous layer(Tensor[N, in_channels, H, W])
returns:
- filter concat(Tensor[N, concat(channels), H, W])
* channels: (conv_1_out, conv_3_out, conv_5_out, proj_out)
'''
output_1 = self.conv_1(x)
output_2 = self.conv_3(self.reduce_3(x))
output_3 = self.conv_5(self.reduce_5(x))
output_4 = self.proj(self.pool(x))
return torch.cat((output_1, output_2, output_3, output_4), 1)
X = torch.randn(1, 192, 28, 28)
model = InceptionModule(in_channels = 192,
reduce_3_out = 96,
reduce_5_out = 16,
conv_1_out = 64,
conv_3_out = 128,
conv_5_out = 32,
proj_out = 32)
output = model(X)
output.size()
torch.Size([1, 256, 28, 28])# after 4a, 4d
# after avg pool2d 4a -> (4, 4, 512), 4d -> (4, 4, 528) from paper page 6 bottom line
# ref(stride, out_channels, ..., etc): http://datacrew.tech/inception-v1-2014/
class AuxiliaryClassifier(nn.Module):
def __init__(self, in_channels, num_classes):
super(AuxiliaryClassifier, self).__init__()
self.auxiliary_classifier = nn.Sequential(nn.AvgPool2d(kernel_size = (5, 5),
stride = 3),
nn.Conv2d(in_channels= in_channels,
out_channels = 128,
kernel_size = (1,1),
stride = 1),
nn.Flatten(),
nn.Linear(in_features = 128 * 4 * 4,
out_features = 1024),
nn.Linear(in_features = 1024,
out_features = num_classes),
nn.Softmax(dim = -1))
def forward(self, x):
return self.auxiliary_classifier(x)
# batch norm, activation fn, ... 생략
class GoogLeNet(nn.Module):
def __init__(self, img_channels = 3, num_classes = 1000):
super(GoogLeNet, self).__init__()
self.prev_inception = nn.Sequential(
nn.Conv2d(in_channels = img_channels,
out_channels = 64,
kernel_size = (7, 7),
stride = 2,
padding = 3),
nn.MaxPool2d(kernel_size = (3, 3),
stride = 2,
padding = 1),
nn.Conv2d(in_channels = 64,
out_channels = 192,
kernel_size =(3, 3),
stride = 1,
padding = 1),
nn.MaxPool2d(kernel_size = (3, 3),
stride= 2,
padding = 1)
)
self.inception_3a = InceptionModule(in_channels = 192,
reduce_3_out = 96,
reduce_5_out = 16,
conv_1_out = 64,
conv_3_out = 128,
conv_5_out = 32,
proj_out = 32)
self.inception_3b = InceptionModule(in_channels = 256,
reduce_3_out = 128,
reduce_5_out = 32,
conv_1_out = 128,
conv_3_out = 192,
conv_5_out = 96,
proj_out = 64)
self.pool_3 = nn.MaxPool2d(kernel_size = (3, 3),
stride = 2,
padding = 1)
self.inception_4a = InceptionModule(in_channels = 480,
reduce_3_out = 96,
reduce_5_out = 16,
conv_1_out = 192,
conv_3_out = 208,
conv_5_out = 48,
proj_out = 64)
self.classifier_1 = AuxiliaryClassifier(in_channels = 512,
num_classes = num_classes)
self.inception_4b = InceptionModule(in_channels = 512,
reduce_3_out = 112,
reduce_5_out = 24,
conv_1_out = 160,
conv_3_out = 224,
conv_5_out = 64,
proj_out = 64)
self.inception_4c = InceptionModule(in_channels = 512,
reduce_3_out = 128,
reduce_5_out = 24,
conv_1_out = 128,
conv_3_out = 256,
conv_5_out = 64,
proj_out = 64)
self.inception_4d = InceptionModule(in_channels = 512,
reduce_3_out = 144,
reduce_5_out = 32,
conv_1_out = 112,
conv_3_out = 288,
conv_5_out = 64,
proj_out = 64)
self.classifier_2 = AuxiliaryClassifier(in_channels = 528,
num_classes = num_classes)
self.inception_4e = InceptionModule(in_channels = 528,
reduce_3_out = 160,
reduce_5_out = 32,
conv_1_out = 256,
conv_3_out = 320,
conv_5_out = 128,
proj_out = 128)
self.pool_4 = nn.MaxPool2d(kernel_size = (3, 3),
stride = 2,
padding = 1)
self.inception_5a = InceptionModule(in_channels = 832,
reduce_3_out = 160,
reduce_5_out = 32,
conv_1_out = 256,
conv_3_out = 320,
conv_5_out = 128,
proj_out = 128)
self.inception_5b = InceptionModule(in_channels = 832,
reduce_3_out = 192,
reduce_5_out = 48,
conv_1_out = 384,
conv_3_out = 384,
conv_5_out = 128,
proj_out = 128)
self.pool_5 = nn.AdaptiveAvgPool2d((1, 1))
self.drop = nn.Dropout(p=0.4)
self.fc = nn.Sequential(
nn.Flatten(),
nn.Linear(in_features = 1024,
out_features = num_classes),
nn.Softmax(dim = -1)
)
def forward(self, x):
x = self.prev_inception(x)
print(x.size())
x = self.inception_3a(x)
print(x.size())
x = self.inception_3b(x)
print(x.size())
x = self.pool_3(x)
x = self.inception_4a(x)
print(x.size())
out_1 = self.classifier_1(x)
x = self.inception_4b(x)
print(x.size())
x = self.inception_4c(x)
print(x.size())
x = self.inception_4d(x)
print(x.size())
out_2 = self.classifier_2(x)
x = self.inception_4e(x)
print(x.size())
x = self.pool_4(x)
x = self.inception_5a(x)
print(x.size())
x = self.inception_5b(x)
print(x.size())
x = self.pool_5(x)
x = self.drop(x)
x = self.fc(x)
print(x.size())
return out_1, out_2, x
model = GoogLeNet()
x = torch.randn(1, 3, 224, 224)
out_1, out_2, out = model(x)
torch.Size([1, 192, 28, 28])
torch.Size([1, 256, 28, 28])
torch.Size([1, 480, 28, 28])
torch.Size([1, 512, 14, 14])
torch.Size([1, 512, 14, 14])
torch.Size([1, 512, 14, 14])
torch.Size([1, 528, 14, 14])
torch.Size([1, 832, 14, 14])
torch.Size([1, 832, 7, 7])
torch.Size([1, 1024, 7, 7])
torch.Size([1, 1000])
print('out_1 size: ', out_1.size())
print('out_2 size: ', out_2.size())
print('out size: ', out.size())
out_1 size: torch.Size([1, 1000])
out_2 size: torch.Size([1, 1000])
out size: torch.Size([1, 1000])
# model parameter 개수
count = 0
for param in model.parameters():
count += param.numel()
print(count)
13374120
'딥러닝 > 딥러닝 모델' 카테고리의 다른 글
| PyTorch로 Transformer 구현하기 (0) | 2022.12.07 |
|---|---|
| PyTorch로 EfficientNet 구현하기 (0) | 2022.12.07 |
| PyTorch로 ResNet 구현하기 (0) | 2022.12.07 |
| PyTorch로 VGG network 구현하기 (0) | 2022.12.07 |
| PyTorch로 딥러닝 모델 구현하는 방법(LeNet) (0) | 2022.12.07 |