2022. 12. 7. 22:35ㆍ딥러닝/딥러닝 모델
# my github: https://github.com/withAnewWorld/models_from_scratch
# my blog
# https://self-deeplearning.blogspot.com/
# https://self-deeplearning.tistory.com/
import torch
import torch.nn as nn
import torch.nn.functional as F
Ref¶
- Transformer
paper(Attention Is All You Need): https://arxiv.org/abs/1706.03762
cs231n transformer slide: http://cs231n.stanford.edu/slides/2021/lecture_11.pdf
blog: http://peterbloem.nl/blog/transformers
github: https://github.com/bentrevett/pytorch-seq2seq/blob/master/6%20-%20Attention%20is%20All%20You%20Need.ipynb
official PyTorch Transformer code: https://pytorch.org/docs/stable/_modules/torch/nn/modules/transformer.html#Transformer - Positional Encoding
blog: https://towardsdatascience.com/master-positional-encoding-part-i-63c05d90a0c3
blog: https://hongl.tistory.com/231
blog: https://velog.io/@gibonki77/DLmathPE
목차¶
- Transformer (roughly)
- Embedding, Skip Connection, Feed Forward Network
- Data Flow in Transformer
- Multi-Head Attention
- Attention
- Self Attention
- Multi-Head Attention
- Vectorized Multi-Head Attention
- Masked Multi-Head Attention
- Transformer (without Positional Encoding)
- Positional Encoding
- Count
- Normalized Count
- Binary indexing
- Sinusoidal Positional Encoding
- Transformer
PyTorch로 번역기 구현하기 vol 1
In [ ]: # my github: https://github.com/withAnewWorld/models_from_scratch # my blog # https://self-deeplearning.blogspot.com/ # https://self-deeplearning.tistory.com/ In [1]: # colab과 google drive를 연동하기 위한 code cell입니다. # google drive
self-deeplearning.tistory.com
PyTorch로 번역기 구현하기 vol 2
In [ ]: # my github: https://github.com/withAnewWorld/models_from_scratch # my blog # https://self-deeplearning.blogspot.com/ # https://self-deeplearning.tistory.com/ In [1]: # colab과 google drive를 연동하기 위한 code cell입니다. # google drive
self-deeplearning.tistory.com
Transformer (roughly)¶
Transformer는 기존 RNN기반 Seq2Seq와 비슷하게 Encoder(왼쪽 모듈)와 Decoder(오른쪽 모듈)로 이루어져 있지만,
안의 내용은 완전히 탈바꿈한 Deep Learning Model 입니다.
먼저, Embedding과 Add & Norm 그리고 Feed Forward 블럭(block)은 아실법한 내용이니 간단히 설명드리겠습니다.
- Embedding
Embedding은 lookup table을 이용하여 sequential data를 벡터로 변환하는 기법입니다.
(PyTorch는 nn.Embedding을 통해 해당 기법을 제공하고 있습니다.) - Add & Norm
Add의 경우 ResNet에서 개발된 residual connection(or skip connection)을 의미합니다.
Norm의 경우 Batch Normalization 또는 Layer Normalization을 의미합니다.
Transformer에서는 Layer Normalization을 사용했습니다.
즉 해당 block은 다음과 같습니다.
¶
- Feed Forward
해당 block은 Linear Layer와 활성함수(activation func)를 묶어놓은
다중 퍼셉트론 레이어(Multi Layer Perceptron)입니다.
¶
Data Flow in Transformer¶
설명을 위해 Transformer를 이용하여 번역(translation) task를 수행하는 경우로 가정하겠습니다.
- Transformer Encoder
RNN이 옆으로 Layer를 쌓았다면 Transformer는 Stack과 같이 위로 Layer를 쌓는 구조입니다(CNN 기반 모델과 비슷하게).
즉 Encoder Block 옆의 (Nx)은 얼마나 Layer를 쌓을 것인지 나타내는 기호입니다.
생소하신 부분은 Multi-Head Attention 모듈 진입 전 데이터가 세 부분으로 나뉘는 구조일 것입니다.
해당 구조는 이전 연산의 결과값이 나눠지는 것(split)이 아니라 각각 온전한 결과값을 받아 특정 연산을 처리한다고 우선 이해하시면 됩니다.
# pseudo code
class TransformerEncoder(nn.Module):
...
def forward(self, x):
'''
inputs:
x(Tensor[batch_size, source_length])
returns:
encoder_out(Tensor[batch_size, source_length, embed_dim])
'''
# 약어 정의 (src_len: source_length, emb_dim: embed_dim, enc: encoder, mlp:Multi Layer Perceptron)
embedded = Embedding(x) # (batch_size, src_len) -> (batch_size, src_len, emb_dim)
encoder_input = positional_encoding(embedded) + embedded # (batch_size, src_len, emb_dim)
# 반복 시작(for N)
attended = multi_head_attention(encoder_input, encoder_input, encoder_input) #(batch_size, src_len, emb_dim)
skip_connection = encoder_input + attended
normalized = LayerNorm(skip_connection)
mlp_out = feed_forward(normalized)
# mlp_out.size(): (batch_size, src_len, emb_dim)
skip_connection = mlp_out + normalized
normalized = LayerNorm(skip_connection)
encoder_input = normalized # (batch_size, src_len, emb_dim)
# 반복 끝(End for)
enc_out = encoder_input
return enc_out
Encoder 안에서 데이터가 어떻게 흐르는지 대충 윤곽이 잡히실 것 같으니 Decoder로 넘어가겠습니다.
- Transformer Decoder
기존의 Seq2Seq 모델과 같이 Transformer Decoder는 Encoder의 결과값을 받아 연산을 수행합니다.
# pseudo code
class TransformerDecoder(nn.Module):
...
def forward(self, y, enc_out):
'''
inputs:
y(Tensor[batch_size, target_length])
enc_out(Tensor[batch_size, source_length, embed_dim])
returns:
output_probabilities(Tensor[batch_size, target_length, output_dim)
'''
# 약어 정의 (tgt_len: target_length, emb_dim: embed_dim, dec: decoder, mlp: Multi Layer Perceptron)
embedded = Embedding(y) # (batch_size, tgt_len) -> (batch_size, tgt_len, emb_dim)
dec_input = positional_encoding(embedded) + embedded # (batch_size, tgt_len, emb_dim)
# 반복 시작(for N)
masked_attended = masked_multi_head_attention(dec_input, dec_input, dec_input) #(batch_size, tgt_len, emb_dim)
skip_connection = dec_input + masked_attended
normalized = LayerNorm(skip_connection)
attended = multi_head_attention(enc_out, enc_out, normalized)
# enc_out: (batch_size, src_len, emb_dim)
# normalized: (batch_size, tgt_len, emb_dim)
# attended: (batch_size, tgt_len, emb_dim)
skip_connection = normalized + attended
normalized = LayerNorm(skip_connection)
mlp_out = feed_forward(normalized)
# mlp_out.size(): (batch_size, tgt_len, emb_dim)
skip_connection = mlp_out + normalized
normalized = LayerNorm(skip_connection)
dec_input = normalized # (batch_size, tgt_len, emb_dim)
# 반복 끝(End for)
output_probabilities = Softmax(Linear(dec_input)) # (batch_size, tgt_len, out_dim)
return output_probabilities
cf) Encoder의 N(layer 개수)와 Decoder의 N(layer의 개수)는 서로 같지 않아도 됩니다. (표기상의 편리성때문에 모두 N으로 표시한 것)
이제 (Masked)Multi-Head Attention과
Positional Encoding만 무엇인지 알면
Transformer에 대한 이해는 끝나게 됩니다.
우선 알고있는 것을 빠르게 구현한 후
(Masked)Multi-Head Attention과 Positional Encoding에 대해 설명 드리겠습니다.
class TransformerEncoder(nn.Module):
def __init__(self):
super().__init__()
self.embed = nn.Embedding(seq_length, emb_dim)
self.positional_encoding = PositionalEncoding()
self.encoder_layer = nn.ModuleList(
[EncoderBlock() for _ in range(n_layer)]
)
def forward(self, x):
transformer_input = self.positional_encoding(x) + self.embed(x)
for encoder_block in self.encoder_layer:
transformer_input = encoder_block(transformer_input)
out = transformer_input
return out
class EncoderBlock(nn.Module):
def __init__(self):
super().__init__()
self.multi_head_attn = MultiHeadAttn()
self.norm1 = nn.LayerNorm()
self.feed_forward = nn.Sequential(
nn.Linear(emb_dim, 4*emb_dim),
nn.ReLU(),
nn.Linear(4*emb_dim, emb_dim)
)
self.norm2 = nn.LayerNorm()
def forward(self, x):
attended = self.norm1(self.multi_head_attn(x) + x)
return self.norm2(self.feed_forward(attended) + attended)
class TransformerDecoder(nn.Module):
def __init__(self):
super().__init__()
self.embed = nn.Embedding(seq_length, emb_dim)
self.positional_encoding = PositionalEncoding()
self.decoder_layer = nn.ModuleList(
[DecoderBlock() for _ in range(n_layer)]
)
self.fc_out = nn.Sequential(
nn.Linear(emb_dim, out_dim),
nn.SoftMax()
)
def forward(self, x, enc_out):
decoder_input = self.positional_encoding(x) + self.embed(x)
for decoder_block in self.decoder_layer:
decoder_input = decoder_block(decoder_input, enc_out, enc_out)
out = decoder_input
return self.fc_out(out)
class DecoderBlock(nn.Module):
def __init__(self):
super().__init__()
self.masked_multi_head_attn = MaskedMultiHeadAttn()
self.norm1 = nn.LayerNorm()
self.multi_head_attn = MultiHeadAttn()
self.norm2 = nn.LayerNorm()
self.feed_forward = nn.Sequential(
nn.Linear(emb_dim, 4*emb_dim),
nn.ReLU(),
nn.Linear(4*emb_dim, emb_dim)
)
self.norm3 = nn.LayerNorm()
def forward(self, x, enc_query, enc_key):
masked_attended= self.norm1(self.masked_multi_head_attn(x) + x)
attended = nn.norm2(self.multi_head_attn(enc_query, enc_key, masked_attended) + masked_attended)
return self.norm3(self.feed_forward(attended) + attended)
class PositionalEncoding(nn.Module):
pass
class MultiHeadAttn(nn.Module):
pass
class MaskedMultiHeadAttn(nn.Module):
pass
Multi Head Attention¶
- Attention
Attention은 한국어로 집중, 관심사항 정도로 번역할 수 있습니다.
Deep Learning에서 Attention은 어느 데이터에 '집중'할 것인가? 정도로 간략히 해석할 수 있습니다.
우선, 예시를 위해 영어 문장을 한국어 문장으로 번역하는 경우에 대해 살펴보겠습니다.
Source Sentence: "Attention Is All You Need"
머리 속으로든 사전을 이용하든 다음과 같은 방식으로 번역이 진행될 것입니다.

(google 검색엔진의 결과값으로는 [주목, 주의, 수리, 차려 자세, ...] 가 산출되네요.)
이 때, 중요한 점은 위의 예를 통해 알 수 있듯 Attention과 matching되는 한국어는 꾀나 많다는 점입니다.
이는 단어의 서순, 문장, 문맥, 문화 차이 등 다양한 변수에 의해 같은 단어(source word)도 다른 단어(target word)로 풀이되기 때문입니다.
따라서 해당 문장에서 "Attention"과 매칭되는 여러 한국어 중
어떤 단어가 가장 적합한지 판단한 후 사용해야 번역이 올바르게 이루어집니다.
(Source 단어와 Target 단어간의 비교)
이러한 내용을 알고리즘으로 구현한 것이 Attention mechanism 입니다.
Cosine Similarity
NLP에서 단어는 Vector로 표현됩니다.
즉 두 단어를 비교하기 위해선 두 Vector를 비교해야합니다.
Vector를 비교하는 가장 손쉬운 방법 중 하나로는 Cosine Similarity(코사인 유사도)가 있습니다.
(2차원인 경우 $\vec A \cdot \vec B = |\vec A| |\vec B| cos\theta$)
해당 아이디어를 이용하여 Attention mechanism은 벡터의 내적을 이용하여 두 단어간의 유사도를 측정합니다.
cf) 사실 Attention mechanism에는 벡터의 내적말고도 다양한 방법론이 존재합니다.
더 자세히 알아보고 싶으시면 (Luong et al. Effective Approaches to Attention-based Neural Machine Translation. 2015) 을 참고해주세요
- Self Attention
Self Attention은 위의 예에서 나온 Source 단어와 Target 단어간의 유사도를 측정하는 것이 아닌
Source 문장 안에서 Source 단어끼리의 유사도를 측정하는 알고리즘입니다. (자기 참조)
cf) Self Attention은 Target sentence에 대해서도 수행할 수 있습니다.
즉, sentence = ['attention', 'is', 'all', 'you', 'need'] 일 때,
Self Attention은 'attention' 단어와 자신을 포함한 나머지 단어(attention, is, all, you, need)간의 비교입니다.
그러면 Self Attention은 무슨 의미를 가지는 것인지 의문이 드실 것입니다.
우선 일반적으로 Seq2Seq 모델은 모두 Encoder를 통해 Source Setence의 정보를 맥락 정보(Context Vector)로 압축하여 Decoder에 전달합니다.
즉 번역을 하기 위해서는 Source Sentence의 정보를 효율적으로 압축해야 합니다.
사람이 번역하는 경우 맥락 정보에는 다음과 같은 사항들이 압축될 것입니다.
1) 각 단어가 가지는 여러 의미
2) 각 단어의 성분(주어, 목적어, ...)
3) 각 단어가 가지는 긍정적 or 부정적 이미지
.
.
.
-> 문장의 뜻(맥락)
기존에는 RNN의 Recurrence 구조를 통해 Context Vector를 만들어냈다면
Transformer는 Attention만을 이용해서 Context Vector를 만들어낸다는 것이 차이점입니다.

여기서 주목할 점은 Attention mechanism은 마치 검색엔진을 이용하는 것과 비슷한 구조를 띤다는 점입니다.
즉, 묻고자 하는 바(단어간의 유사도)가 있고 이에 따른 결과값을 산출하는 구조입니다.
이는 프로그래밍적으로
묻고자 하는 바: Query
Query와 비교할 데이터: Key
Key값을 통해 접근할 수 있는 데이터: Value
로 나타낼 수 있습니다.
원활한 이해를 돕기 위해 다음의 예시를 들겠습니다.
Query = "Attention 한국어 뜻"
Key = ["Attention 한국어로 번역", "Attention", "Attention 노래", "NewJeans", ...]
Value = [각 Key값에 대응(mapping)되는 웹페이지(html)]
Weighted Sum: Value를 통해 가공된 웹페이지(html)
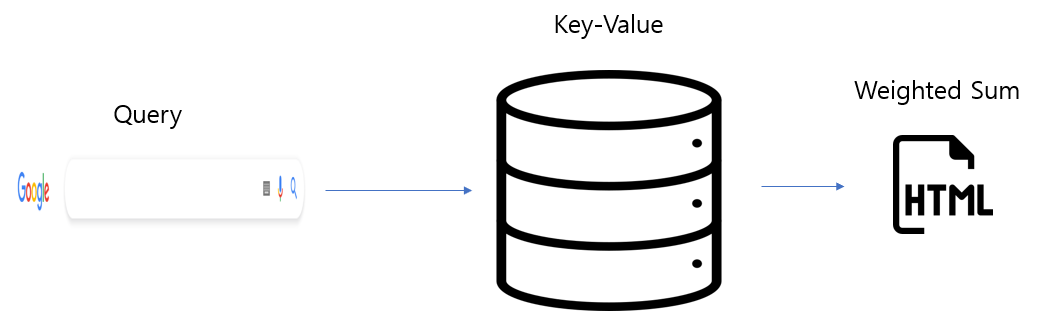
(Attention의 설명을 위한 예시일 뿐입니다. 정확한 검색엔진 작동방식은 다른 문헌을 참고해주세요)
Self Attention의 수식은 다음과 같습니다.
$$ y_{i} = \sum_{j} softmax(W_{i,\ j})x_{j} \\ (W_{i,\ j} = x_{i} \cdot x_{j}^{T}) \\(i: 현재\ token,\ j: 모든\ token)$$
Slef Attention의 수식을 Query, Key, Value를 이용하여 표현하면 다음과 같습니다.
1) softmax?
내적을 통해 유사도를 구한 후 softmax를 하는 이유는 cosine 유사도와 같이
정규화(normalized)된 값을 얻기 위함입니다.
왜냐하면 Deep Learning 모델은 크기가 큰 값을 지속적으로 feed할 경우 훈련(train)이 적절하게 되지 않기 때문입니다.
그러면 cosine 유사도 대신 왜 softmax를 사용할까요?
이에 대한 이유로는 deep learning에서 데이터를 해석할 때
확률로 해석하고자 하는 경향성이 있기 때문으로 생각합니다.
즉, Attention은 Query와 Key의 유사도 확률에 대한 Value의 가중합(Weighted Sum)으로 해석할 수 있습니다.
2) 가중합?
훈련(train)이 적절하게 이루어질 경우 Embedding vector는 다음과 같은 특성을 띱니다.
vector(king) - vector(man) + vector(woman) $\simeq$ vector(queen)
(ref: Efficient Estimation of Word Representations in Vector Space)
즉, 임베딩 벡터간 연산이 사람이 이해할 수 있는 방법으로 바뀌게 됩니다.
한편, 가중합은 다음과 같은 결과를 나타냅니다.
p(attention) + p'(is) + p''(all) + ...
즉, 가중합을 통해 output vector는 표현력이 더욱 풍부해지는 효과를 가집니다.
ex) output = 90%의 (attention) 의미 + 5%의 (is) 의미 + 2%의 (all) 의미 + ...
# self attention
batch_size, seq_length, emb_dim = 1, 4, 5
x = torch.randn(batch_size, seq_length, emb_dim)
query, key, value = x, x, x
similarity = torch.bmm(query, key.transpose(1, 2)) # (batch_size, seq_length, seq_length)
similarity_p = F.softmax(similarity, dim = -1) # (batch_size, seq_length, seq_length)
weighted_sum = torch.bmm(similarity_p, value) # (batch_size, seq_length, emb_dim)
print('similarity_p')
print(similarity_p)
print('-'*20)
print('weighted_sum')
print(weighted_sum)
similarity_p
tensor([[[9.9637e-01, 1.9821e-04, 3.4106e-03, 2.2651e-05],
[1.6019e-03, 4.9172e-01, 1.1873e-01, 3.8795e-01],
[5.8131e-03, 2.5040e-02, 8.6330e-01, 1.0585e-01],
[4.9540e-08, 1.0499e-04, 1.3582e-04, 9.9976e-01]]])
--------------------
weighted_sum
tensor([[[-0.9495, -1.3336, 0.4078, 1.0864, 1.1539],
[ 1.3426, 0.2499, -0.8715, -0.5918, -0.8535],
[ 0.7035, -0.5405, -1.8074, 0.1934, -0.3063],
[ 2.3354, -0.5784, -0.6451, -1.1405, -2.0048]]])
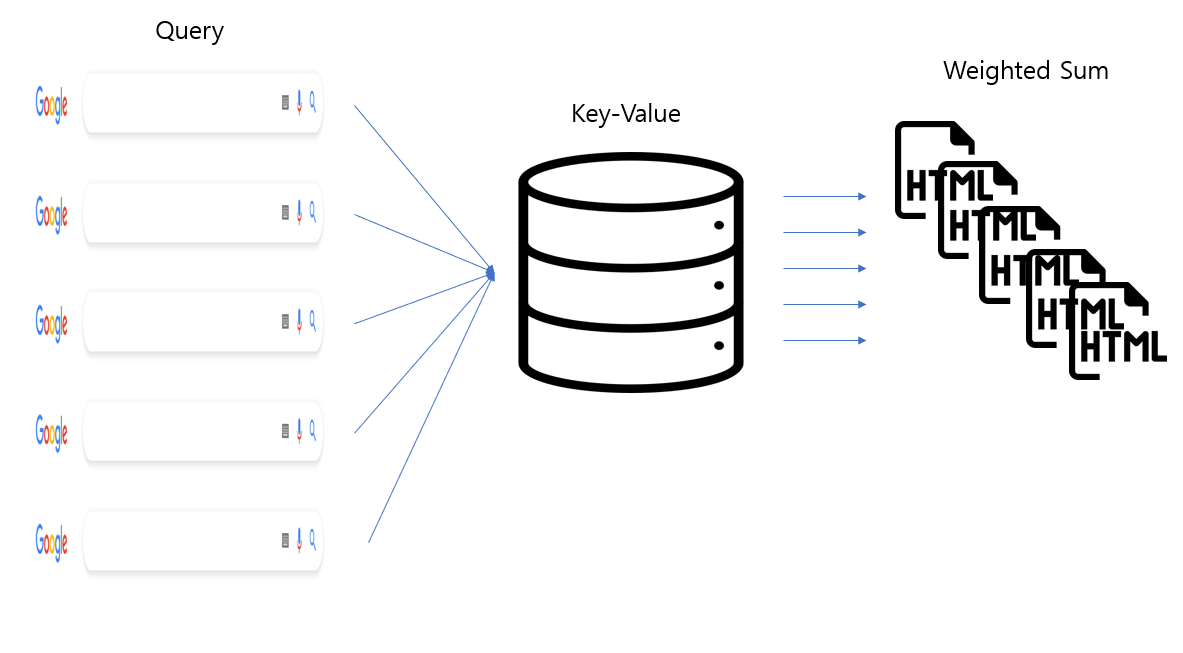
- Multi-Head Attention
Multi-Head Attention은 Attention 연산을 한 번에 여러 번 수행하는 것입니다.
즉 한 번의 검색을 통해 원하는 웹페이지를 찾는 대신에
여러 번의 검색을 통해 원하는 웹페이지를 찾겠다는 생각입니다.
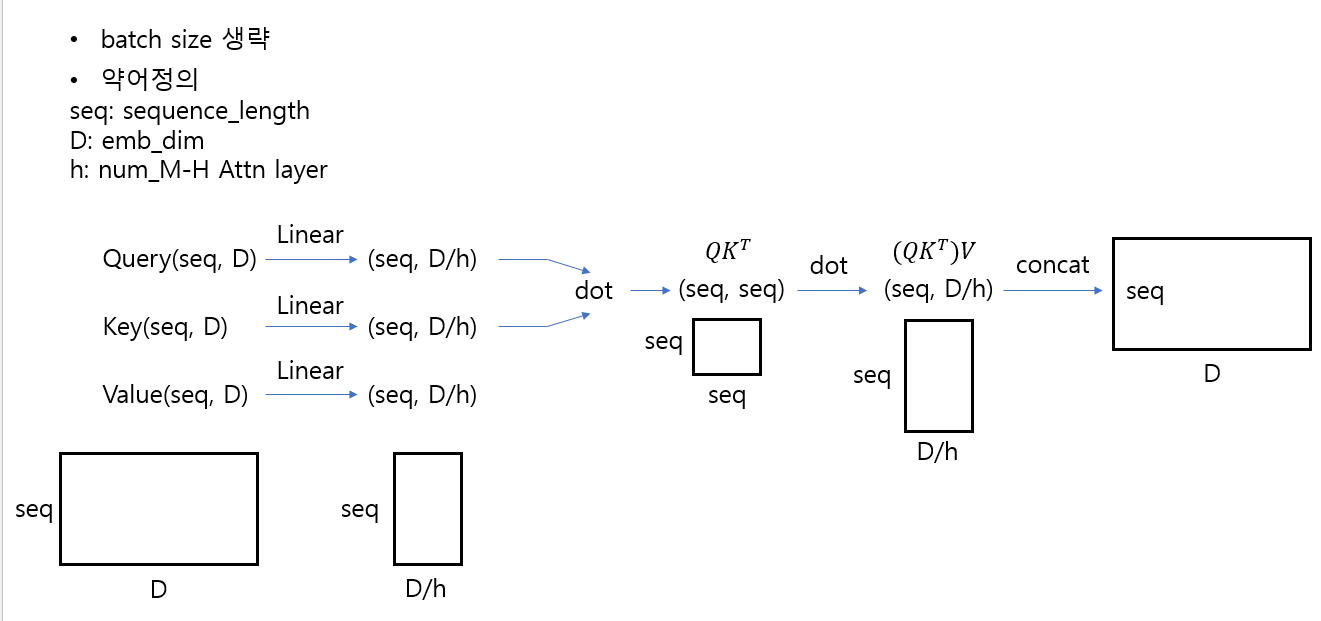
 $$MultiHead(Q, K, V) = Concat(head_{1},\ head_{2}, ...,\ head_{h})W^{O} \\ (head_{i} = Attention(QW^{Q}_{i}, KW^{K}_{i}, VW^{V}_{i}) \\ (Attention(Q, K, V) = softmax(QK^{T}/\sqrt{d_{k}})V)$$
$$MultiHead(Q, K, V) = Concat(head_{1},\ head_{2}, ...,\ head_{h})W^{O} \\ (head_{i} = Attention(QW^{Q}_{i}, KW^{K}_{i}, VW^{V}_{i}) \\ (Attention(Q, K, V) = softmax(QK^{T}/\sqrt{d_{k}})V)$$
$$h: Number\ of\ Multi\ Head(i= 1\ to\ h) \\$$
1) Linear Layer?
Query, Key, Value에 Linear Layer를 거친 후 Attention을 하는 이유는
Learnable Parameter(Linear Layer)를 통해
각각의 embed vector가 $Query,\ Key,\ Value$에 적합한 벡터로 변환되기를 기대하기 때문입니다.
이 때 Linear Layer의 크기는 ($d_{model},\ d_{k}$)입니다. ($d_{k} = d_{v} = d_{model} / h$)
2) $Q \cdot K^{T}/\sqrt{d_{k}}$?
$\sqrt{d_{k}}$로 나누는 이유는 softmax는 값이 커질경우
gradient exploding / vanishing 문제를 야기하기 때문에 해당 값으로 나눠 이를 해결합니다.
Visualization of Multi-Head Attention
class MultiHeadAttn(nn.Module):
def __init__(self, emb_dim, n_head, device):
super().__init__()
self.W_Q, self.W_K, self.W_V = {}, {}, {}
self.n_head = n_head
self.device = device
for i in range(n_head):
self.W_Q[i] = nn.Linear(emb_dim, emb_dim // n_head, bias = False)
self.W_K[i] = nn.Linear(emb_dim, emb_dim // n_head, bias = False)
self.W_V[i] = nn.Linear(emb_dim, emb_dim // n_head, bias = False)
self.W_O = nn.Linear(emb_dim, emb_dim, bias = False)
self.attention = nn.ParameterDict()
def forward(self, query, key, value, mask = None):
'''
inputs
- query(Tensor[batch_size, query_lenth, emb_dim)
- key(Tensor[batch_size, key_lenth, emb_dim])
- value(Tensor[batch_size, value_lenth, emb_dim])
returns:
'''
scale = torch.FloatTensor([emb_dim/self.n_head]).to(self.device) # scale = (d_k/h)
query, key, value = query.to(self.device), key.to(self.device), value.to(self.device)
# Q, K, V = (batch_size, seq_length, emb_dim)
for i in range(self.n_head):
Q, K, V = self.W_Q[i].to(self.device)(query), self.W_K[i].to(self.device)(key), self.W_V[i].to(self.device)(value)
# Q, K, V = (batch_size, seq_length, emb_dim // n_head)
similarity = torch.bmm(Q, K.transpose(1, 2)) / torch.sqrt(scale)
# similarity: (batch_size, query_length, key_length)
#masked attention
if mask is not None:
mask = mask.to(self.device)
similarity= similarity.masked_fill_(mask==0, -float('inf'))
similarity_p = F.softmax(similarity, dim = -1)
self.attention[str(i)] = torch.bmm(similarity_p, V)
# (batch_size, query_length, emb_dim // self.n_head)
multi_head_attn = torch.cat([self.attention[str(i)] for i in range(self.n_head)], dim = -1)
# (batch_size, query_length, emb_dim)
return self.W_O.to(self.device)(multi_head_attn)# (batch_size, query_length, emb_dim)
- Vectorized code
소프트웨어의 속도를 저하시키는 요인에는 여러가지가 있지만
그 중 코드상에서 많이 나타나는 원인 중 하나는 과도한 반복문의 사용입니다.
위의 코드(Naive algorithm)는 Transformer의 장점인 빠른 속도를 상당히 저하시키기 때문에 실제로 사용되지는 않습니다.
벡터간 연산을 이용하면 반복문을 사용하지 않고
Naive algorithm과 동일한 결과값을 얻을 수 있습니다.
Naive algorithm은 한 번에 하나씩 일을 처리하는 것과 같지만
Vectorized code는 여러가지 일을 묶어서 한 번에 일괄적으로 처리하는 것과 같습니다.
Vectorized Multi-Head Attention

class VectorizedMultiHeadAttn(nn.Module):
def __init__(self, emb_dim, n_head, device):
super().__init__()
self.W_Q = nn.Linear(emb_dim, emb_dim, bias = False)
self.W_K = nn.Linear(emb_dim, emb_dim, bias = False)
self.W_V = nn.Linear(emb_dim, emb_dim, bias = False)
self.W_O = nn.Linear(emb_dim, emb_dim, bias = False)
self.n_head = n_head
self.emb_dim = emb_dim
self.device = device
def forward(self, query, key, value, mask = None):
emb_dim = self.emb_dim
batch_size, query_length, emb_dim = query.size()
key_length = key.size(1)
scale = torch.FloatTensor([emb_dim/self.n_head]).to(self.device)
query, key, value = query.to(self.device), key.to(self.device), value.to(self.device)
Q, K, V = self.W_Q(query), self.W_K(key), self.W_V(value)
# Q, K, V: (batch_size, seq_length, emb_dim)
Q = Q.contiguous().view(batch_size, query_length, self.n_head, emb_dim // self.n_head).transpose(1, 2)
K = K.contiguous().view(batch_size, key_length, self.n_head, emb_dim // self.n_head).transpose(1, 2)
V = V.contiguous().view(batch_size, key_length, self.n_head, emb_dim // self.n_head).transpose(1, 2)
# Q, K, V: (batch_size, self.n_head, seq_length, emb_dim//self.n_head)
Q = Q.contiguous().view(batch_size * self.n_head, query_length, emb_dim // self.n_head)
K = K.contiguous().view(batch_size * self.n_head, key_length, emb_dim // self.n_head)
V = V.contiguous().view(batch_size * self.n_head, key_length, emb_dim // self.n_head)
# Q. K, V: (batch_size * self.n_head, seq_length, emb_dim//n_head)
similarity = torch.bmm(Q, K.transpose(1, 2)) / torch.sqrt(scale)
# (batch_size * self.n_head, query_length, key_length)
# masked attention
if mask is not None:
mask = mask.to(self.device)
similarity= similarity.masked_fill_(mask==0, -float('inf'))
similarity_p = F.softmax(similarity, dim = -1)
# (batch_size * self.n_head, query_length, key_length)
multi_head_attn = torch.bmm(similarity_p, V)
# (batch_size * self.n_head, query_length, emb_dim // self.n_head)
multi_head_attn = multi_head_attn.contiguous().view(batch_size, self.n_head, query_length, emb_dim // self.n_head)
# (batch_size, n_head, query_length, emb_dim/self.n_head)
multi_head_attn = multi_head_attn.transpose(1, 2)
# (batch_size, query_length, self.n_head, emb_dim // self.n_head)
multi_head_attn = multi_head_attn.contiguous().view(batch_size, query_length, emb_dim)
# (batch_size, query_length, emb_dim)
return self.W_O(multi_head_attn) # (batch_size, query_length, emb_dim)
결과값 비교(naive, vectorized)¶
import time
import numpy as np
def rel_error(x, y):
""" returns relative error (code from cs231n assignments)"""
return np.max(np.abs(x - y) / (np.maximum(1e-8, np.abs(x) + np.abs(y))))
# init parameters
batch_size = 1
seq_length = 3
emb_dim = 24
n_head = 8
x = torch.randn(batch_size, seq_length, emb_dim)
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# multi head attn init
multi_head_attn = MultiHeadAttn(emb_dim, n_head, device)
vectorized_multi_head_attn = VectorizedMultiHeadAttn(emb_dim, n_head, device)
# Linear layer 변수 matching
vectorized_multi_head_attn.W_Q.weight = nn.Parameter(torch.cat([multi_head_attn.W_Q[i].weight for i in range(n_head)], dim = 0).to(device))
vectorized_multi_head_attn.W_K.weight = nn.Parameter(torch.cat([multi_head_attn.W_K[i].weight for i in range(n_head)], dim = 0).to(device))
vectorized_multi_head_attn.W_V.weight = nn.Parameter(torch.cat([multi_head_attn.W_V[i].weight for i in range(n_head)], dim = 0).to(device))
vectorized_multi_head_attn.W_O.weight = nn.Parameter(multi_head_attn.W_O.weight.to(device))
with torch.no_grad():
vectorized_multi_head_attn = vectorized_multi_head_attn.to(device)
vectorized_multi_head_attn.eval()
s = time.time()
vectorized_output = vectorized_multi_head_attn(query= x, key = x, value = x)
v_elapsed = time.time() - s
multi_head_attn = multi_head_attn.to(device)
multi_head_attn.eval()
s = time.time()
naive_output = multi_head_attn(query = x, key = x, value = x)
n_elapsed = time.time() - s
print('Relative error between vectorized and navie:', rel_error(vectorized_output.cpu().numpy(), naive_output.cpu().numpy()))
print('vectorized version is %.2fx faster than naive version (device: %s, batch size: %d, seq_length: %d, emb_dim: %d, n_head: %d)'
% ((n_elapsed / v_elapsed), device, batch_size, seq_length, emb_dim, n_head))
Relative error between vectorized and navie: 0.0
vectorized version is 4.78x faster than naive version (device: cuda, batch size: 1, seq_length: 3, emb_dim: 24, n_head: 8)
Masked Multi-Head Attention¶
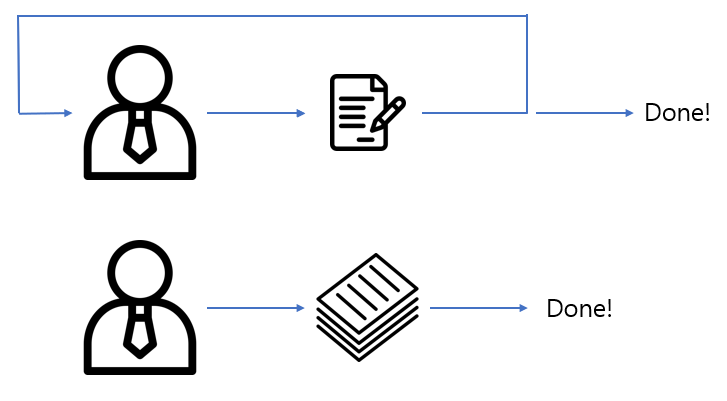
Data를 모두 병렬처리함으로써 Transformer는
정답을 모두 알려주고 학습을 진행하는 꼴로 바뀌게 됩니다.
RNN Decoder
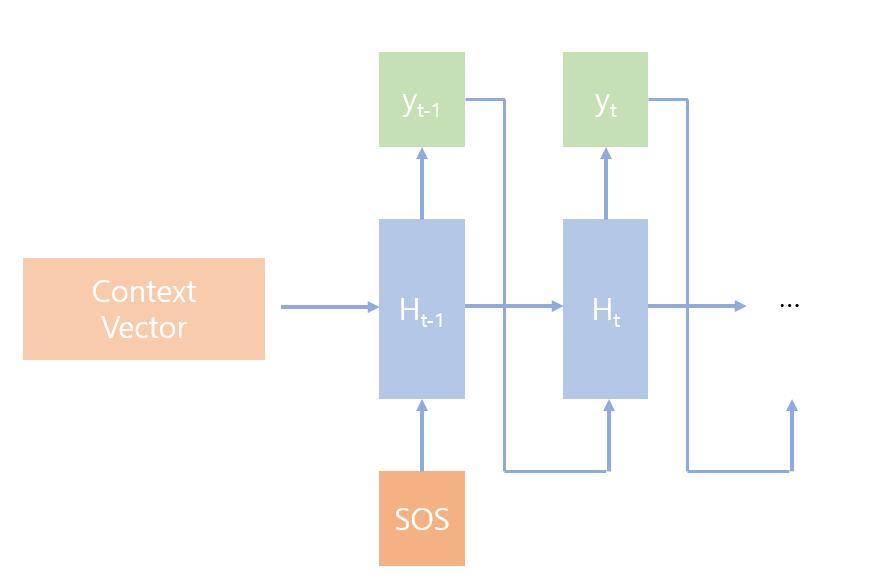
우리는 TRansformer를 RNN의 recurrence 구조처럼 Encoder의
Context 벡터만을 이용하여 번역을 진행하는 경우
Context 벡터와 token[0]를 이용하여 번역을 진행하는 경우
context 벡터와 token[0], token[1]을 이용하여 번역을 진행하는 경우
...
와 같이 이루고 싶습니다.
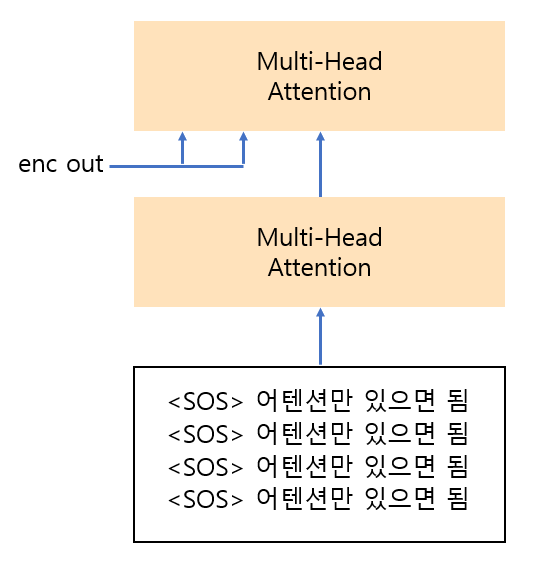
Transformer Decoder
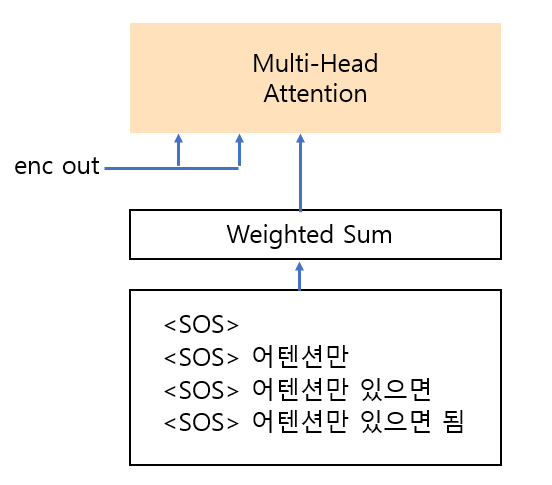
그러면 위의 그림과 같이 target sentence를 나누는 방식이 떠오르실 것입니다.
하지만 문제점은 해당 방법은 병렬처리를 할 수 없다는 점에 있습니다.
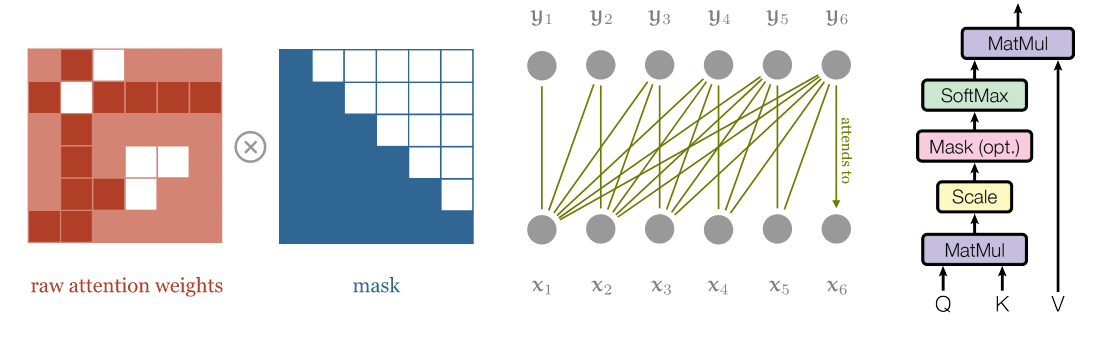
이를 해결하기 위해 input은 병렬로 feed 하되 Attention 연산을 아래와 같은 구조로 진행하여 유사도 확률을 0으로 만들면
0인 확률은 가중합의 결과에 영향을 끼치지 않으니 autoregressive 특성을 띠게됩니다.
# init query, key
batch_size, emb_dim = 1, 512
query_length, key_length = 5, 5
query = torch.randn(batch_size, query_length, emb_dim)
key = torch.randn(batch_size, key_length, emb_dim)
# similarity
similarity = torch.bmm(query, key.transpose(1, 2)) # (batch_size, query_length, key_length)
# masked attention!
mask = torch.tril(torch.ones(query_length, key_length))
masked_attended = similarity.masked_fill_(mask==0, -float('inf'))[0]
masked_attended
tensor([[-18.6227, -inf, -inf, -inf, -inf],
[-35.2376, -11.0780, -inf, -inf, -inf],
[ -3.2281, -23.5369, -46.5295, -inf, -inf],
[ 10.0105, -2.7133, 44.1611, 6.4874, -inf],
[-31.7343, -22.5114, 15.3287, 6.4891, 11.5723]])F.softmax(masked_attended, dim = -1) # similarity_p
tensor([[1.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00],
[3.2183e-11, 1.0000e+00, 0.0000e+00, 0.0000e+00, 0.0000e+00],
[1.0000e+00, 1.5136e-09, 1.5648e-19, 0.0000e+00, 0.0000e+00],
[1.4744e-15, 4.3926e-21, 1.0000e+00, 4.3505e-17, 0.0000e+00],
[3.5540e-21, 3.5989e-17, 9.7703e-01, 1.4155e-04, 2.2832e-02]])Transformer(without Positional Encoding)¶
class TransformerEncoder(nn.Module):
def __init__(self, query_length, emb_dim, n_head, n_layer, device):
super().__init__()
self.device = device
self.embed = nn.Embedding(query_length, emb_dim)
#self.positional_encoding = PositionalEncoding()
self.encoder_layer = nn.ModuleList(
[EncoderBlock(emb_dim, n_head, device) for _ in range(n_layer)]
)
def forward(self, x):
#transformer_input = self.positional_encoding(x) + self.embed(x)
transformer_input = self.embed(x.to(self.device))
for encoder_block in self.encoder_layer:
transformer_input = encoder_block(transformer_input)
return transformer_input
class EncoderBlock(nn.Module):
def __init__(self, emb_dim, n_head, device):
super().__init__()
self.n_head = n_head
self.device = device
self.multi_head_attn = VectorizedMultiHeadAttn(emb_dim, n_head, device)
self.norm1 = nn.LayerNorm(emb_dim)
self.feed_forward = nn.Sequential(
nn.Linear(emb_dim, 4*emb_dim),
nn.ReLU(),
nn.Linear(4*emb_dim, emb_dim)
)
self.norm2 = nn.LayerNorm(emb_dim)
def forward(self, x):
x = x.to(self.device)
attended = self.norm1(self.multi_head_attn(query = x, key = x, value = x) + x)
return self.norm2(self.feed_forward(attended) + attended)
class TransformerDecoder(nn.Module):
def __init__(self, query_length, emb_dim, n_head, n_layer, device, out_dim = 512):
super().__init__()
self.device = device
self.n_layer = n_layer
self.embed = nn.Embedding(query_length, emb_dim)
#self.positional_encoding = PositionalEncoding()
self.decoder_layer = nn.ModuleList(
[DecoderBlock(emb_dim, n_head, device) for _ in range(n_layer)]
)
self.fc_out = nn.Sequential(
nn.Linear(emb_dim, out_dim),
nn.Softmax(dim = -1)
)
def forward(self, x, enc_key, enc_value, tgt_mask):
#transformer_input = self.positional_encoding(x) + self.embed(x)
transformer_input = self.embed(x.to(self.device))
for decoder_block in self.decoder_layer:
transformer_input = decoder_block(transformer_input, enc_key, enc_value, tgt_mask)
out = transformer_input
return self.fc_out(out)
class DecoderBlock(nn.Module):
def __init__(self, emb_dim, n_head, device):
super().__init__()
self.masked_multi_head_attn =VectorizedMultiHeadAttn(emb_dim, n_head, device)
self.norm1 = nn.LayerNorm(emb_dim)
self.multi_head_attn = VectorizedMultiHeadAttn(emb_dim, n_head, device)
self.norm2 = nn.LayerNorm(emb_dim)
self.feed_forward = nn.Sequential(
nn.Linear(emb_dim, 4*emb_dim),
nn.ReLU(),
nn.Linear(4*emb_dim, emb_dim)
)
self.norm3 = nn.LayerNorm(emb_dim)
def forward(self, x, enc_key, enc_value, tgt_mask):
query_length, key_length = x.size(1), enc_key.size(1)
x, enc_key, enc_value = x.to(device), enc_key.to(device), enc_value.to(device)
masked_attended= self.norm1(self.masked_multi_head_attn(x, x, x, tgt_mask) + x)
attended = self.norm2(self.multi_head_attn(masked_attended, enc_key, enc_value) + masked_attended)
return self.norm3(self.feed_forward(attended) + attended)
query_length = 10
key_length= 10
batch_size = 1
n_tgt_tokens = 512
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x = torch.randint(10, size = (batch_size, query_length))
mask = torch.tril(torch.ones(query_length, key_length))
encoder = TransformerEncoder(query_length = query_length, emb_dim = 512, n_head = 8, n_layer = 6, device = device)
decoder = TransformerDecoder(query_length = query_length, emb_dim = 512, n_head = 8, n_layer = 6, device = device, out_dim = n_tgt_tokens)
with torch.no_grad():
# naive Transformer Seq2Seq
encoder.eval()
encoder.to(device)
enc_out = encoder(x)
decoder.eval()
decoder.to(device)
dec_out = decoder(x, enc_out, enc_out, mask)
Positional Encoding(PE)¶
Transformer의 경우 RNN과 다르게 recurrence 구조가 아니기 때문에 단어간의 위치에 대한 정보가 담기지 않습니다.
Transformer의 구조를 다시 한 번 상기해보면
(Masked) Multi-Head Attention
Feed Forward network
Layer Normalization + skip connection
fc_out
로 이루어져 있습니다.
즉, Transformer는 sequential data를 통째로 받아 선형 변환(Linear Mapping)을 하는 구조이기 때문에
위치에 대한 정보가 학습 중에 담기지 않습니다.
cf) RNN과 Transformer 비교
RNN: (token[i] -> RNN cell(Linear mapping) -> token[i+1])
Transformer: (sequence(tokens) -> Linear mapping -> sequence(tokens))
추가로 Multi-Head Attention의 위치정보에 대해 생각 해보겠습니다.
$$Attention(i, j): \sum 유사도(token[i],\ token[j])value$$
sequence_A = [i, am, your, father]
sequence_B = [am, i, your, father]
위의 두 문장을 각각 self attention 연산을 수행한다고 했을 때
i와 your사이의 Attention은 차이가 나지 않습니다.
즉, attention 연산은 순서와 무관한 집합으로서 결과값을 산출하게 됩니다.
하지만 문장의 뜻은 token의 순서에 따라 확연히 다른 의미를 가지게 됩니다.
이에 따라 Transformer가 sequential data를 다루기 위해서는
추가적으로 위치에 대한 정보를 반영할 수 있는 encoding 방법이 필요합니다.
Positional Encoding?¶
그러면 Positional Encoding은 무엇을 뜻하는 것인지 우선 알아보겠습니다.
sequence -> (Positional Encoding Mapping) -> 해당 sequence에서 각 token마다 가지는 고유한 번호(이를 통해 token의 위치정보를 알 수 있다.)
사실 Positional Encoding의 개념은 일상생활 속에서도 많이 사용되고 있습니다.
예를 들어 학교에서 학생들에게 번호를 부여한 후, 번호에 따라 어떤 행위(ex. 번호대로 줄 서세요)
를 부여할 때와 같은 경우가 Positional Encoding의 개념을 일상생활 속에서 적용한 경우입니다.
이를 프로그래밍적인 시야에서 바라보면
list indexing에 Positional Encoding 개념이 적용되고 있다는 것을 알 수 있습니다.
sequence = ['i', 'am', 'your', 'father']
sequence[0] = 'i'
sequence[1] = 'am'
...
Ideal Criterial for Positional Encoding¶
- 각 위치의 Positional Encoding 값은 결정되어야(Deterministic)하는 동시에 유일해야 한다(Uniqueness).
- 데이터와 관계없이 각 위치의 Positional Encoding 값은 동일해야 한다.
- 확장성 (데이터의 길이와 관계없이 적용 가능해야 한다.)
- 간격이 동일하다면 위치와 관계없이 거리는 동일해야 한다.
처음 위의 문장들을 접하시면 감이 잘 안오실 것이기 때문에 하나씩 자세히 설명드리겠습니다.
- 1-1) 각 위치의 Positional Encoding 값은 결정되어야 한다(Deterministic)
입력값이 정해지면 매번 같은 결과값을 산출해야합니다.
예를 들어, $y = x^2$에 $x = 2$를 대입하면 언제나 4라는 결과값이 산출됩니다.
- 1-2) 각 위치의 Positional Encoding값은 유일해야 한다(Uniqueness)
sequence = [i, am, your, father] 일 때
sequence의 n번째 요소에 접근하기 위한 값은 유일해야 합니다.
즉 sequence[0] = 'i'로 결정되었으면 sequence[k] = 'i'를 만족하는 k가 존재해서는 안됩니다.
언뜻 보면 당연해보이는 이 문구는 python의 list indexing에서 지켜지지 않고 있는 것을 알 수 있습니다.
(물론 이는 편리성 제공을 목적으로 유일성 기준을 일부러 깬 것입니다.)
sequence = ['i', 'am', 'your', 'father']
N = len(sequence) # N = 4
sequence[N - 1] == sequence[-1] # True
cf) 유일성이 깨지는 흔한 경우는 주기를 가지는 경우입니다.
- 데이터와 관계없이 각 위치의 Positional Encoding 값은 동일해야 한다.
sequence_1=[i, am, your, father]
sequence_2=[tick, tock]
모든 sequential data에 대해 n번째 요소에 접근하기 위한 Positional Encoding값은 동일해야 합니다.
즉,
sequence_1의 0번째 요소 -> sequence_1[0]
sequence_2의 0번째 요소 -> sequence_2[0]
...
모든 sequence의 0번째 요소 -> sequence[0]
- 확장성 (데이터의 길이와 관계없이 적용 가능해야 한다.)
길이가 가변적인 데이터에 대해 Positonal Encoding을 할 수 있어야 합니다.
극단적으로 예시를 들면 길이가 무한대인 경우에도 Positional Encoding을 통해 값을 할당할 수 있어야 합니다.
- 간격이 동일하다면 위치와 관계없이 거리는 동일해야 한다.
sequence = ['i', 'am', 'your', 'father'] 일 때,
distance('i', 'am') = distance('am', 'your')
이를 일반적인 수식으로 나타내면 다음과 같습니다.
$$distance(x, x+h) = distance(y, y+h)$$ 그러면 PE에 어떠한 기법들이 존재하는지 살펴보고 마지막으로 Transformer에 적용된 Sinusoidal Encoding을 이해해보도록 하겠습니다.
1. Count
sequence = [i, am, your, father]
해당 문장에 대한 위치정보를 순서대로 자연수를 이용하여 부여하는 방식입니다.
일반적인 python의 list indexing으로 생각할 수 있으며 다른 점은 음수를 통한 indexing은 배제한다는 점입니다.
#pseudo code
sequence[i] = i번째 token (i: 0 or 자연수)
Count의 경우 Ideal Criterial를 모두 만족하지만 길이가 매우 긴 sequential data에 대해서는 지나치게 큰 PE의 값이 할당됩니다
문제점
지나치게 큰 값을 모델에 지속적으로 feed할 시에 gradient exploding과 같은 문제점을 발생.
즉, 딥러닝 모델은 정규화된 PE 값을 feed할 필요성을 갖습니다.
cf) why?
-> Linear layer = Wx + b
-> Local gradient of W = x
-> 따라서 x의 크기가 클 경우 gradient exploding
for more detail, see(multiply gate of Patterns in backward flow): https://cs231n.github.io/optimization-2/#patterns
2. Normalized Count¶
가장 손쉬운 정규화 방법은 sequential data의 각 count를 n_token으로 나누는 방법입니다.
sequence = ['i', 'am', 'your', 'father']
PE = [1/4, 2/4, 3/4, 4/4] # 4: len(sequence)
문제점
2번 조건을 위배합니다.
- 데이터와 관계없이 각 위치의 Positional Encoding 값은 동일해야 한다.
sequence_1 = ['i', 'am', 'your', 'father']
PE = [1/4, 2/4, 3/4, 4/4]
sequence_2 = ['tick', 'tock']
PE = [1/2, 2/2]
3. Binary Indexing¶
2진수의 경우 0과 1로 이루어져있기 때문에 PE의 값이 지나치게 커질 우려가 없고 벡터로 표현하여 2번 조건을 위배하지 않을 것 같습니다.

문제점
3번 조건을 위배합니다.
4번 조건을 위배합니다.
- 확장성 (데이터의 길이와 관계없이 적용 가능해야 한다.)
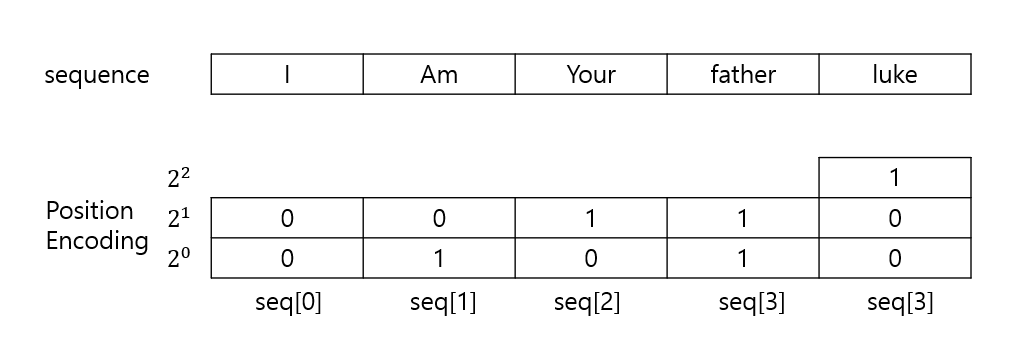
위의 경우와 같이 sequential data를 이진수로 나타낼 때 기존 PE 벡터의 차원을 넘어가는 경우 새로 벡터를 형성해서 재할당 해줘야 합니다.
- 간격이 동일하다면 위치와 관계없이 거리는 동일해야 한다.
#pseudo code
PE(seq[1]) = [0, 1]
PE(seq[2]) = [1, 0]
PE(seq[3]) = [1, 1]
distance([0, 1], [1, 0]) = 2**(1/2)
distance([1, 0], [1, 1]) = 1
solution idea
3번 문제를 해결하기 위해서 벡터의 차원을 고정시키고 그 안에 실수를 우겨넣으면 해결됩니다.
이에 대한 근거로 실수는 특정 범위(ex 폐구간[0, 1])로 구간을 좁혀도 무한개의 실수를 가지고 있으므로
1) normalize에 적합하고
2) 데이터의 길이가 증가하여도 벡터의 차원이 한정된 채로 무한개의 실수가 배정되기 때문에 3번 조건(확장성)을 충족할 수 있습니다.
(Q: 어떻게 0<= x <= 1 일 때 x가 무한개 존재하나요? (x는 실수) A:
실수의 조밀성을 검색해주세요.)
cf) 해당 아이디어는 lookup table을 이용한 embedding 기법의 아이디어와도 유사한 부분이 있으므로 PE로 embedding을 사용할 수 있습니다.
(다만 이상적 PE 기준에 부합하게 학습이 될 것인지는 실험을 통해 확인을 해봐야겠지만
)
-> embedding을 통한 PE에 더 자세히 알고 싶으시다면 Positional Embedding을 검색해주세요.
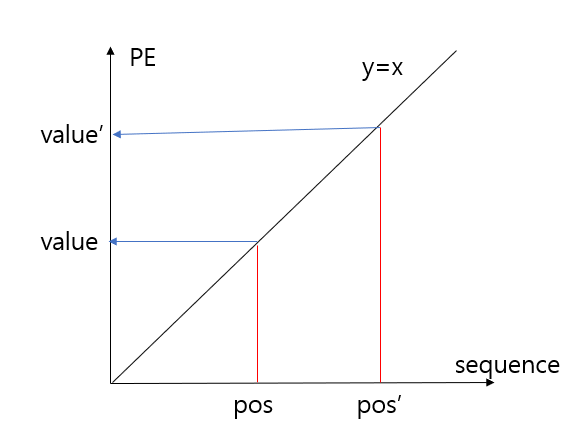
4번 문제의 경우를 해결하기 위해 위치에 따라 일정한 값으로 변환해주는 실수함수가 필요합니다.
$$즉, |f(pos + pos') - f(pos)| = distance(pos,\ pos') $$
Sinusoidal Positional Encoding¶
solution idea를 통해 도출된 함수는 삼각함수(sin, cos)입니다.
(왜 갑자기 삼각함수냐고 물으신다면 저도 모릅니다.
ref: towardsdatascience blog 참고)
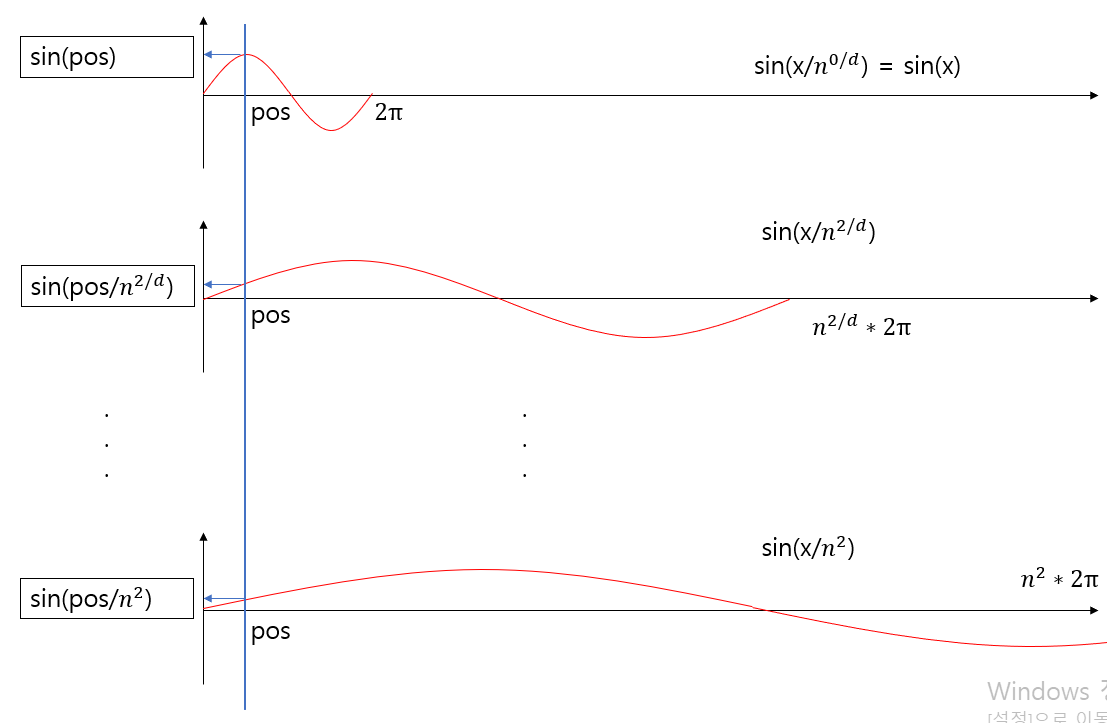
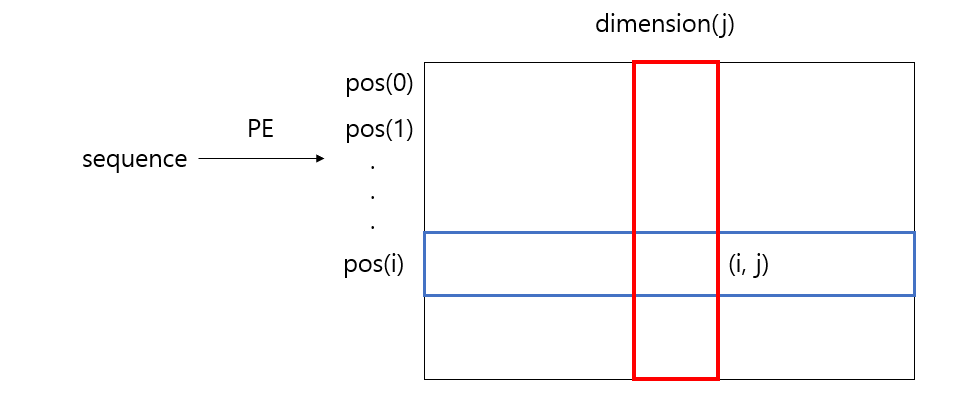 $$pos(i, j) = sin(i/n^{2j/d}) $$
$$pos(i, j) = sin(i/n^{2j/d}) $$
$$(i: token's\ position\ in\ sequence,\ j: each\ dimension,\ n: some\ real\ number, \ d: dimension) $$
sin함수를 통해 PE 값은 [-1, 1] 사이의 값을 갖게 됩니다.
위의 수식을 천천히 살펴봅시다.
sequence = ['i', 'am', 'your', 'father']
PE(sequence[1]) -> 크기가 d인 행벡터, 벡터의 모든 값은 -1과 1사이의 실수 중 하나를 배정받는다.
i = 1인경우, 즉 sequence[1] = 'am'에 대해 다음과 같이 position encoding 됩니다.

그래프를 통한 이해(일반적 버전)
그러면 Sinusoidal PE가 이상적 기준을 모두 만족하는지 살펴보겠습니다.
- 각 위치의 Positional Encoding 값은 결정되어야(Deterministic)하는 동시에 유일해야 한다(Uniqueness).
-> 일반적으로 삼각함수는 주기(cycle)를 가지기 때문에 위의 조건을 만족하지 않습니다.
그러면 주기를 가지지 않는 함수로 값을 배정을 해야하는데 주기를 가지는 함수를 어떻게 주기를 가지지 않는 함수로 바꿀 수 있을까요?
A: 주기를 무한대로 만들면 됩니다.
먼저, sin함수의 경우 $(0,\ {\pi}/2)$ 에서 증가함수라는 것을 짚고 넘어가겠습니다.
Suppose)
PE들 중 마지막 열을 제외한 모든 값들이 동일한 경우가 있다고 가정을 하겠습니다.
즉, 마지막 열의 값만 서로 같다면 두 벡터는 동일하기 때문에 1번 조건에 위배됩니다.
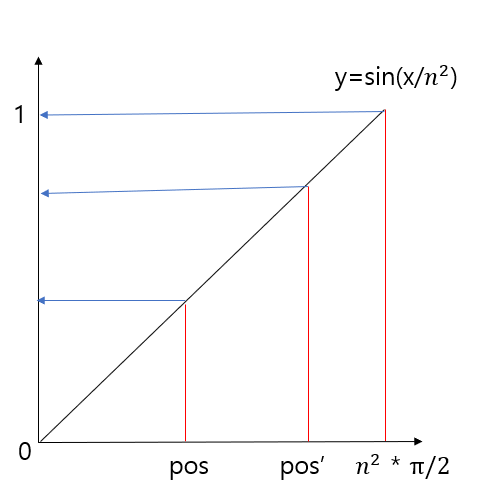
n이 적당히 큰 수가 아닌 $\lim_{n \to \infty} n$ 인 경우,
pos < pos' -> PE(pos) < PE(pos') 를 만족합니다. $(\because \ 증가함수)$
즉 마지막 열의 값은 n이 충분히 클 경우 절대 동일한 값이 나오는 case가 존재하지 않습니다.
따라서 1번 조건을 만족합니다.
- 데이터와 관계없이 각 위치의 Positional Encoding 값은 동일해야 한다.
차원을 고정시키고 각 위치의 Positional Encoding의 값을 정적인 함수를 통해 실수값을 배정하므로 2번 조건을 만족합니다.
- 확장성 (데이터의 길이와 관계없이 적용 가능해야 한다.)
2번 조건과 마찬가지의 이유로 3번 조건을 만족합니다.
- 간격이 동일하다면 위치와 관계없이 거리는 동일해야 한다.
잠깐 곁길로 새서, 사실 여러분에게 아직 말하지 않은 사실이 있습니다.
논문에서 제시한 PE의 수식은 정확히 다음과 같습니다.
$$PE(i, 2j) = sin(i/n^{2j/d}) \ \ (짝수인 경우)$$ $$PE(i, 2j+1) = cos(i/n^{2j/d}) \ \ (홀수인 경우)$$ 안그래도 골치아픈 수식이였는데 더 골치아파졌습니다.
sin함수를 쓸거면 sin함수만 쓰고 cos함수를 쓸거면 cos함수만 쓰지 도대체 왜 이럴까요?
-> Transformer는 선형 변환으로 이루어져 있기 때문에
선형 변환을 통해 각 position data에 접근할 수 있는 것이 자연스럽고 좋은 결과를 도출할 것으로 기대됩니다.
$$ PE[pos] = Linear(PE[pos']) $$
그러면 어떤 선형 변환을 통해 서로 전환이 될 수 있을까요?
삼각함수는 결국 좌표공간과 벡터간의 이루는 각도를 통해 특정 좌표를 나타내는 방법입니다.
즉 삼각함수의 변수는 '각도' 입니다.
해당 아이디어를 통해 PE 벡터는 회전을 통해 다른 PE 벡터로 변환될 수 있다는 점이 떠오를 수 있습니다.
회전 변환
간단한 예시를 위해 dimension = 1인 경우의 PE를 살펴보겠습니다. $$PE(\theta) = [sin(\theta/n^{0/1}),\ cos(\theta/n^{0/1})] = [sin(\theta),\ cos(\theta)]$$ $$PE(\theta + \phi) = [sin(\theta + \phi/n^{0/1}),\ cos(\theta + \phi/n^{0/1})] = [sin(\theta + \phi),\ cos(\theta + \phi)]$$
위의 선형변환을 약간 변형하면 두 position간 변환이 이루어집니다.
그러면 n차원의 경우 어떻게 될까요?
이제 다시 원래의 명제로 돌아와서
(4. 간격이 동일하다면 위치와 관계없이 거리는 동일한지)
에 대해 증명하겠습니다.
먼저, 인접한 Position간 각각의 dim(j)의 각도차이는 모두 동일한 것을 짚고 넘어가겠습니다.
여기서 $l$과 $l'$은 cos 제 2 공식에 의해 같습니다.
따라서 회전각도가 같으면 벡터간 거리는 같습니다. (n차원 증명은 여러분에게 맡기겠습니다. 화이팅)
그리고 sequential 데이터의 간격과 각도 차이는 위치와 관계없이 비례합니다.
따라서 4번 조건을 만족합니다.
cf) 논문에서는 PE벡터의 분모(n)로 10,000을 선택하였습니다.
왜 10,000인지에 대한 설명은 나오지 않지만
1) floating error를 일으키지 않으면서
2) 현재까지 다뤄지는 sequential data를 모두 다루기에
충분히 큰 수라 선택하지 않았나 싶습니다. (실험적으로)
# this code is from cs231n/assignments3/CS231n/transformer_layer.py (copy & paste)
class PositionalEncoding(nn.Module):
"""
Encodes information about the positions of the tokens in the sequence. In
this case, the layer has no learnable parameters, since it is a simple
function of sines and cosines.
"""
def __init__(self, embed_dim, dropout=0.1, max_len=5000):
"""
Construct the PositionalEncoding layer.
Inputs:
- embed_dim: the size of the embed dimension
- dropout: the dropout value
- max_len: the maximum possible length of the incoming sequence
"""
super().__init__()
#self.dropout = nn.Dropout(p=dropout)
assert embed_dim % 2 == 0
# Create an array with a "batch dimension" of 1 (which will broadcast
# across all examples in the batch).
pe = torch.zeros(1, max_len, embed_dim)
i=torch.arange(0, max_len).reshape(max_len, -1)
j= 10000**-(torch.arange(0, 1, 2/embed_dim))
pe[0, :, torch.arange(0, embed_dim, 2)]= torch.sin(i*j)
pe[0, :, torch.arange(1, embed_dim, 2)]= torch.cos(i*j)
# Make sure the positional encodings will be saved with the model
# parameters (mostly for completeness).
self.register_buffer('pe', pe)
def forward(self, x):
"""
Element-wise add positional embeddings to the input sequence.
Inputs:
- x: the sequence fed to the positional encoder model, of shape
(N, S, D), where N is the batch size, S is the sequence length and
D is embed dim
Returns:
- output: the input sequence + positional encodings, of shape (N, S, D)
"""
N, S, D = x.shape
output= x+self.pe[:, :S, :]
# output = self.dropout(output)
return output
Heatmap of Positional Encoding¶
# this code is from https://towardsdatascience.com/master-positional-encoding-part-i-63c05d90a0c3 (copy & paste)
import matplotlib.pyplot as plt
dim = 128
max_len = 256
pe = PositionalEncoding(dim, max_len = max_len)
x = torch.randn(1, max_len, dim)
pe_matrix = pe(x) - x # this code is different from the original
# heatmap plot
plt.pcolormesh(pe_matrix[0], cmap='seismic') # I use different cmap for fun and to make difference vivid
plt.xlabel('Dimension') # I think dimension is better than depth(from original) for unity
plt.xlim((0, dim))
plt.ylabel('Position')
plt.title("PE matrix heat map")
plt.colorbar()
plt.show()

Analysis of heatmap¶
1) Dimension이 증가할수록 각 position간의 차이(세로선)는 미미합니다.(비슷한 색을 띰)
2) Dimension을 조금 더 줄여도 Deterministic & Uniqueness 조건을 만족할 것 같습니다.
Transformer¶
class TransformerEncoder(nn.Module):
def __init__(self, query_length, emb_dim, n_head, n_layer, device):
super().__init__()
self.device = device
self.embed = nn.Embedding(query_length, emb_dim)
self.pe = PositionalEncoding(emb_dim)
self.encoder_layer = nn.ModuleList(
[EncoderBlock(emb_dim, n_head, device) for _ in range(n_layer)]
)
def forward(self, x):
transformer_input = self.pe(self.embed(x.to(self.device)))
for encoder_block in self.encoder_layer:
transformer_input = encoder_block(transformer_input)
return transformer_input
class TransformerDecoder(nn.Module):
def __init__(self, query_length, emb_dim, n_head, n_layer, device, out_dim = 512):
super().__init__()
self.device = device
self.n_layer = n_layer
self.embed = nn.Embedding(query_length, emb_dim)
self.pe = PositionalEncoding(emb_dim)
self.transformer_layer = nn.ModuleList(
[DecoderBlock(emb_dim, n_head, device) for _ in range(n_layer)]
)
self.fc_out = nn.Sequential(
nn.Linear(emb_dim, out_dim),
nn.Softmax(dim = -1)
)
def forward(self, x, enc_key, enc_value, tgt_mask):
transformer_input = self.pe(self.embed(x.to(self.device)))
for transformer_block in self.transformer_layer:
transformer_input = transformer_block(transformer_input, enc_key, enc_value, tgt_mask)
out = transformer_input
return self.fc_out(out)
query_length = 10
key_length= 10
batch_size = 1
n_tgt_tokens = 512
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
x = torch.randint(10, size = (batch_size, query_length))
mask = torch.tril(torch.ones(query_length, key_length))
encoder = TransformerEncoder(query_length = query_length, emb_dim = 512, n_head = 8, n_layer = 6, device = device)
decoder = TransformerDecoder(query_length = query_length, emb_dim = 512, n_head = 8, n_layer = 6, device = device, out_dim = n_tgt_tokens)
with torch.no_grad():
# naive Transformer Seq2Seq
encoder.eval()
encoder.to(device)
enc_out = encoder(x)
decoder.eval()
decoder.to(device)
dec_out = decoder(x, enc_out, enc_out, mask)
dec_out.size()
torch.Size([1, 10, 512])Transformer의 장점¶
그래서 RNN으로 줄곧 잘 해왔는데 Transformer를 개발한 이유가 뭘까요?
많은 이유가 있지만 크게 다음의 두가지로 압축할 수 있을 것 같습니다.
- 성능
- 속도
1) 성능
Transformer 이전 번역 문제에서 SOTA 모델은 Attention 기반 RNN Seq2Seq 였습니다.
RNN 모델은 Multi-Head Attention이 아닌 단일 Attention을 수행하여 성능이 Transfomer 만큼 뛰어나지 않습니다.
즉 Multi-Head Attention 모듈이 Transformer 성능의 핵심입니다.
2) 속도
Recurrence구조를 가지는 RNN과 다르게 Transformer는 병렬처리를 통해 데이터를 모두 처리합니다.
병렬처리의 위력은 Vectorized code에서 잘 보셨을 것입니다.
의의
일반적으로 모델의 성능과 속도는 trade-off 관계에 있습니다.
하지만 Transformer는 이러한 반비례 관계를 깨버린 동시에
통역사와 비슷한 수준의 번역 성능을 보여 NLP 영역에 판도를 뒤바꾸었습니다.
이제 Transformer 모델은 NLP에 국한되는 것이 아닌 Deep Learning 전반에 깊게 뿌리 뻗었습니다.
심지어 RNN뿐 아니라 CNN 또한 Transformer로 대체하는 분위기가 형성되었고 결과 또한 CNN을 능가하고 있습니다.
ex) ViT, DETR, DINO(Transformer + self supervised learning), ...
해당 notebook을 통해 Transformer의 모든 것을 이해하셨길 바랍니다 :)
Try!¶
- code Refactoring
최대한 깔끔한 코드로 나타내려했지만 역량 한계 & 설명의 필요성 때문에 코드가 지저분합니다.
조금 더 유지보수하기 쉽고 깔끔한, 그리고 error에 대응하는 코드로 Refactoring 해보세요!
Plus) 조금 더 속도가 빠르고(more vectorized) 메모리 사용이 적은 모델로 Refactoring 해보세요! - Make your own Transformer
이해한 내용을 바탕으로 논문과 reference, ref code 등을 이용하여 여러분이 직접 Transformer를 구현해보세요! - NLP task using Transformer
Transformer를 이용하여 NLP task(번역, 텍스트 분류 등)를 수행해보세요!
cf) Transformer를 통해 Vision task(image classification, object dection, ...)에도 도전해보세요! - Design model based on Transformer
현재 다양한 NLP영역에서 SOTA성능을 보이는 GPT, BERT와 같은 Transformer 기반 model을 설계해보세요! - 설계 / 설명 오류, 생략된 이론 등을 말해주세요!
같이 성장해요 :) - anything with your creativity!
'딥러닝 > 딥러닝 모델' 카테고리의 다른 글
| PyTorch로 EfficientNet 구현하기 (0) | 2022.12.07 |
|---|---|
| PyTorch로 ResNet 구현하기 (0) | 2022.12.07 |
| PyTorch로 GoogLeNet 구현하기 (0) | 2022.12.07 |
| PyTorch로 VGG network 구현하기 (0) | 2022.12.07 |
| PyTorch로 딥러닝 모델 구현하는 방법(LeNet) (0) | 2022.12.07 |