2022. 12. 7. 17:20ㆍ딥러닝/딥러닝 모델
# my github: https://github.com/withAnewWorld/models_from_scratch
# my blog
# https://self-deeplearning.blogspot.com/
# https://self-deeplearning.tistory.com/
import torch
import torch.nn as nn
import torch.nn.functional as F
Ref¶
- Efficient Net
paper: https://arxiv.org/abs/1905.11946
how to make EfficientNet with PyTorch(Youtuber: Aladdin Persson): https://www.youtube.com/watch?v=fR_0o25kigM&list=PLhhyoLH6IjfxeoooqP9rhU3HJIAVAJ3Vz&index=20
architecture picture: https://www.researchgate.net/figure/The-structure-of-an-EfficientNetB0-model-with-the-internal-structure-of-MBConv1-and_fig2_351057828 - blog: https://lynnshin.tistory.com/53, https://lynnshin.tistory.com/13
- official PyTorch code: https://github.com/pytorch/vision/blob/main/torchvision/models/efficientnet.py
- Mobile Net v2
paper: https://arxiv.org/abs/1801.04381
blog(depthwise conv): https://coding-yoon.tistory.com/122 - SE Net
paper: https://arxiv.org/abs/1709.01507
blog: https://deep-learning-study.tistory.com/539
목차¶
- Efficient net 탄생배경
- Mobile Net v2
- depthwise conv
- depthwise separable conv
- inverted residual block
- SENet
- Efficient Net Base Model(EfficientNet B0)
- Compound tune
- Efficient Net(B0~B7)
EfficientNet¶
탄생배경
model architecture에 대한 연구는 활발히 진행 되어왔지만 해당 모델이 architecture에서 최대의 성능을 내는 것인지 확인하기 어려움
(ex. VGG, ResNet, GoogLeNet, ...)
ex) ResNet의 경우 최적의 성능을 내는 depth를 어떻게 설정할 것인가?
기존 연구에서 개별 변수(모델 layer의 깊이, input image의 크기(Height X Width), 각 layer의 out channel)에 대한 연구는 진행된 적있지만 이들을 통합적으로 고려한 연구는 진행되지 않았음
EfficientNet은
1) model layer의 width(out channel)
2) model layer의 depth
3) input image의 resolution(Height x Width)
을 동시에 조절(compound scaling)하여 최적의 조합을 찾고자 함(주어진 컴퓨터 자원하에서)
즉, 목적함수:
max Accuracy(network)max Accuracy(network)
(variable: depth, width, resolution)
s.t)
Memory(network) <= target_memory
Flops(network) <= target_flops
cf) flops: 초당 부동소수점 연산
Efficient Net의 경우 base model을 생성하기 위해
1) Moblie Net v1, v2에서 소개된 depth wise convolution, inverted residual connnection
2) SENet
3) Stochastic Depth(생략)
을 구현할 줄 알아야 합니다.
Mobile Net v2¶
모바일 기기(ex.스마트폰) 환경에서 deep learning을 구현하기 위해 고안된 Mobile net의 version 2
- 특징
1) 모바일 환경에서 작동해야하는 만큼 메모리 부하가 적어야 한다.
2) 적은 computing 자원으로도 빠르게 결과를 도출해야 한다.
-> 연산 효율성 극대화
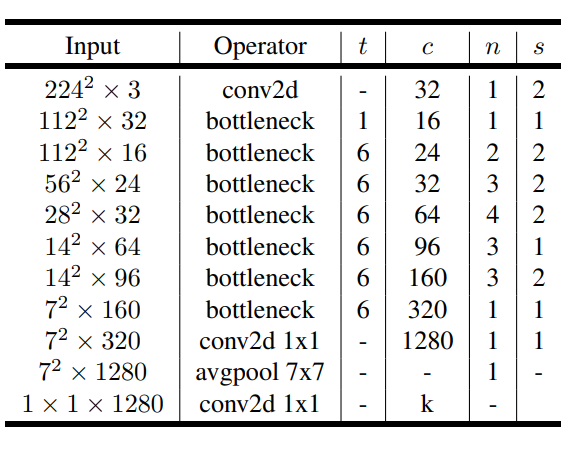
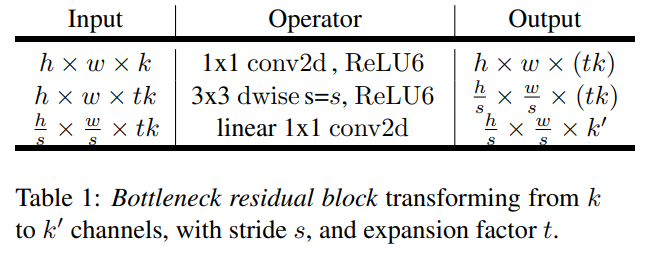
MobileNet v2에서 모르실만한 모듈은 bottleneck일 것입니다.
bottleneck module은 다음과 같이 이루어져 있습니다.
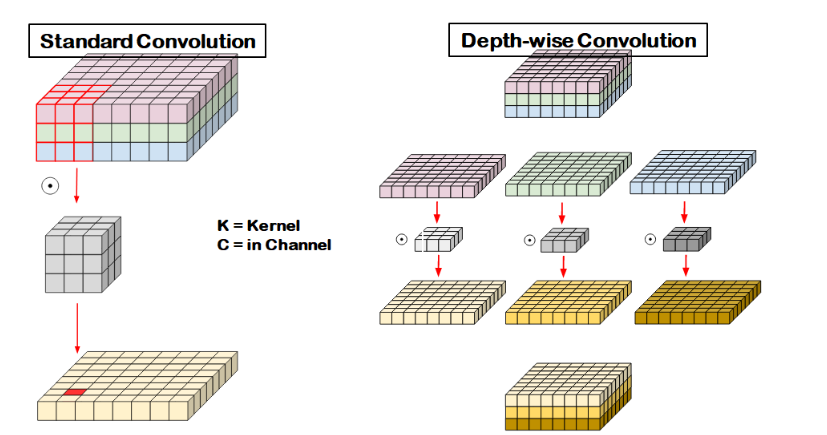
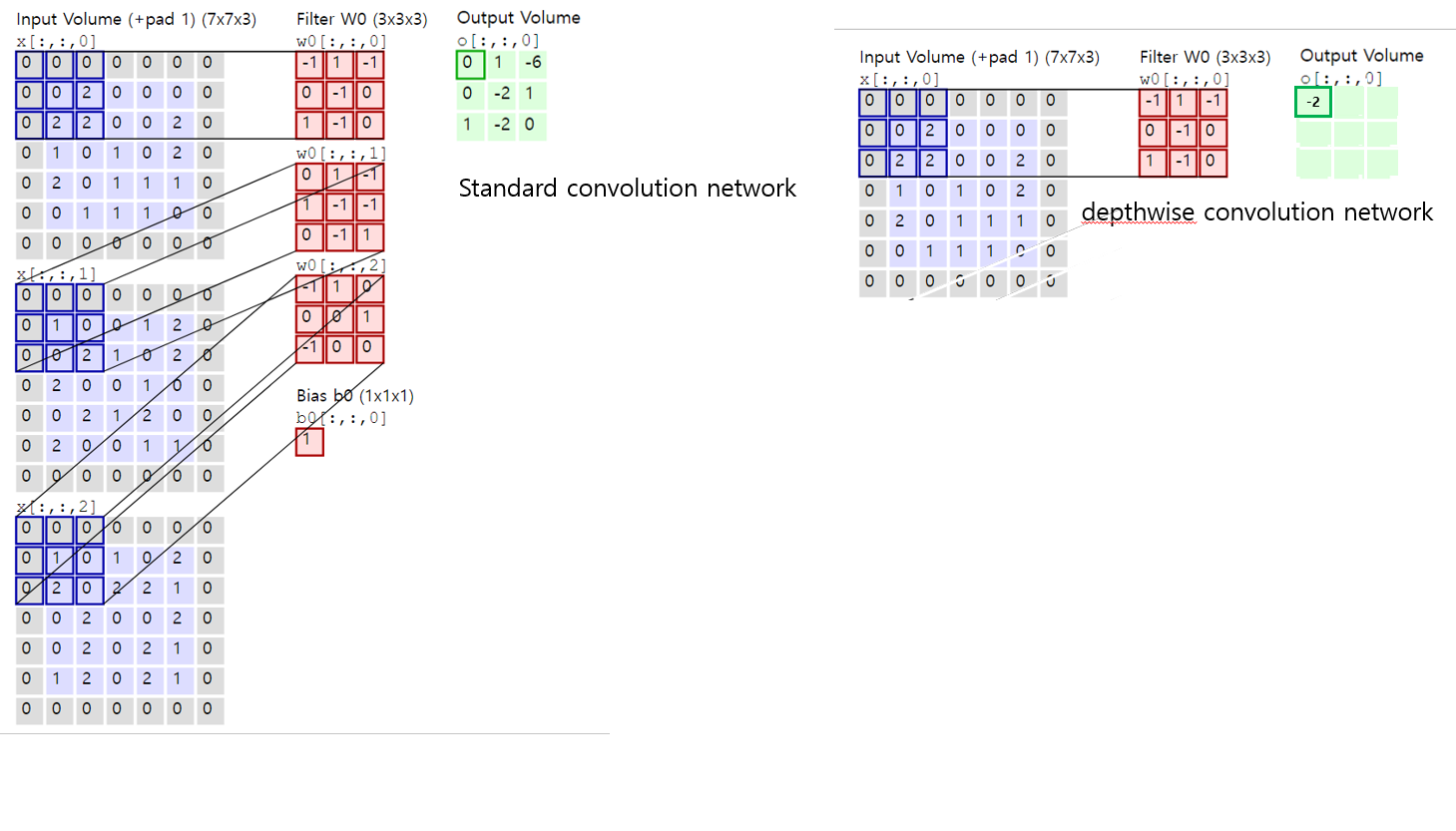
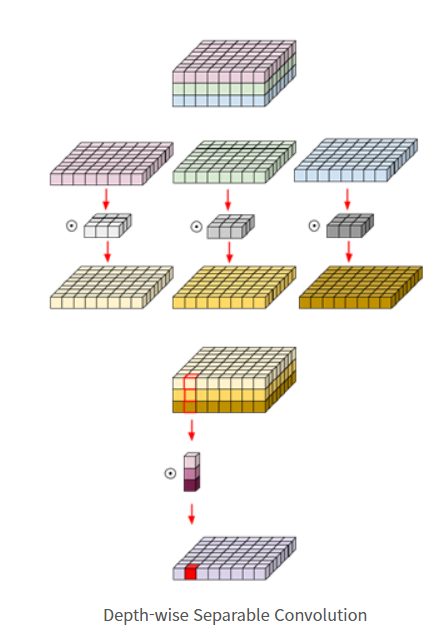
depthwise conv¶
기존의 conv net의 경우 input(C, H, W)의 모든 C(channel)에 대해 weight sum을 진행.
반면 depthwise conv net의 경우 input(C, H, W)를 각 C(channel)로 쪼갠 후(1, H, W)
convolution 연산 진행, 결과값 concat
# pseudo code
def conv():
'''
input(Tensor[N, C, H, W]) (N: num_imgs, C: channels, H: height, W: width)
filter(Tensor[F, C, HH, WW]) (F: num_filters, C: channels, HH: filter height, WW: filter width)
'''
one_feature_map
while:
sum(input[N, :, stride:stride+HH, stride:stride+WW] * filter[F, :, :, :])
slide window(stride)
def depthwise_conv():
one_feature_map
while:
output[i] = sum(input[N, i, stride:stride+HH, stride:stride+WW] * filter[F, i, :, :])
slide window(stride)
Why depthwise conv?
기존 conv의 경우 하나의 feature map을 계산하기 위해
kernel_size kernel_size in_channels의 parameters 필요.
반면 depthwise conv의 경우
kernel_size * kernel_size의 parameters 필요
-> 연산량 효율적 감소
class DepthWiseConv(nn.Module): # we will not use this module. It's just for explanation
def __init__(self, in_channels = 3, kernel_size = 3, stride = 2):
super(DepthWiseConv, self).__init__()
'''
spilt input tensor into [N, 1, H, W]
and then apply conv(In_channels = 1, out_chacnnels = 1)
last concat outputs
input
- input_tensor: Tensor[N, C, H, W]
- kernel_size(int)
output
- concat((Tensors), dim = 1))
* Tensors(List): [Tensor[N, 1, H', W'], Tensor[N, 1, H', W'], ...]
* len(Tensors) = C
'''
if kernel_size == 3:
padding = 1
elif kernel_size == 5:
padding = 2
self.convs = nn.ModuleList([nn.Conv2d(in_channels = 1,
out_channels = 1,
kernel_size = kernel_size,
stride = stride,
padding = padding,
bias = False) for i in range(in_channels)]) # conv2d groups keyward를 통해 쉽게 depth wise conv 가능
def forward(self ,x):
x_split = torch.split(x, 1, dim=1)
output = [conv(x_split[i]) for i, conv in enumerate(self.convs)]
return torch.cat(output, dim = 1)
x = torch.randn(1, 3, 224, 224)
model = DepthWiseConv(3)
depth_wise_groups = nn.Conv2d(in_channels = x.size(1), # groups keyword를 활용한 depthwise conv net
out_channels = x.size(1),
kernel_size = (3, 3),
stride = 2,
padding = 1,
groups = x.size(1),
bias = False)
with torch.no_grad():
for i in range(x.size(1)):
depth_wise_groups.weight[i] = model.convs[i].weight # for matching each of conv parameters
out = model(x)
correct_out = depth_wise_groups(x)
torch.equal(out, correct_out)
Trueclass DepthWiseConv(nn.Module):
def __init__(self, in_channels = 3, kernel_size = 3, stride = 2):
super(DepthWiseConv, self).__init__()
'''
inputs
- input_tensor: Tensor[N, C, H, W]
- kernel_size(int)
- stride(int)
outputs
- Tensor[N, C, H, W]
'''
if kernel_size == 3:
padding = 1
elif kernel_size == 5:
padding = 2
self.conv = nn.Conv2d(in_channels = in_channels,
out_channels = in_channels,
kernel_size = kernel_size,
stride = stride,
padding = padding,
groups = in_channels)
def forward(self ,x):
return self.conv(x)
depthwise separable conv¶
두 개의 module로 구성
1) depthwise conv
2) pointwise conv(1x1 conv)
(1x1 conv)의 경우 주로 input tensor의 channel을 변경하고자 할 때 많이 사용
pointwise conv의 경우 연산량이 매우 적고 depthwise conv의 경우 상대적으로 더 연산량이 많음.
- depthwise separable conv 목적
이에 따라 pointwise conv을 이용해 연산량을 최대한 줄이고 depthwise conv을 통해 feature 추출
class PointwiseConv(nn.Module):
def __init__(self, in_channels, out_channels):
super().__init__()
self.pointwise = nn.Conv2d(in_channels = in_channels,
out_channels = out_channels,
kernel_size = (1, 1),
stride = 1)
def forward(self, x):
return self.pointwise(x)
Inverted Residual Block¶
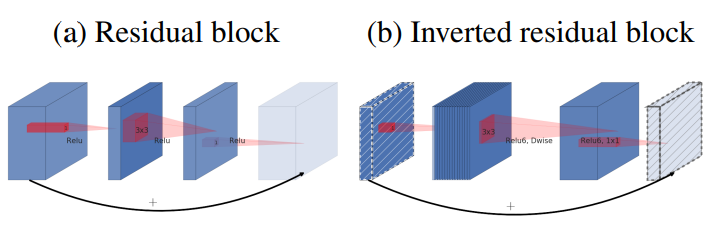
기존의 residual block의 경우
(wide -> narrow -> wide)
input의 channel 감소 (1x1 conv) & activation
conv & activation
channel 증가(1x1 conv) & activation
skip connection (x+=identity)
inverted residual block
(narrow -> wide -> narrow)
input channel 증가 & activation
conv & activation
channel 감소 (1x1 conv) & activation
skip connection (x+=identity)
-> 목적: 더 적은 channel의 tensor를 connection 함으로써 연산량 감소
class LinearBottleneck(nn.Module):
def __init__(self, in_channels, expansion, out_channels, stride):
super().__init__()
self.in_channels = self.in_channels
self.out_channels = self.out_channels
self.stride = stride
self.pointwise = pointwise_conv(in_channels, expansion)
self.depth_wise_conv = depth_wise_conv(in_channels = expansion, kernel_size = 3, stride = stride)
self.proj = pointwise_conv(expansion, out_channels)
def forward(self, x):
identity = x
x = self.pointwise(x)
x = self.depth_wise_conv(x)
x = self.proj(x)
# inverted residual block
if self.in_channels == self.out_channels and self.stride == 1:
x += identity
return x
SENet(Squeeze-and-Excitation Networks)¶
탄생 배경
기존 conv net의 경우 input tensor(C, H, W)에 대해 각 필터(Filter(C, H', W'))를 weight sum하므로 모든 channel의 정보가 하나로 담겨집니다.
def conv(input):
'''
input(Tensor[N, C, H, W])
filter(Tensor[F, C, HH, WW])
'''
while:
sum(input[N, :, stride:stride+HH, stride:stride+WW] * filter[F, :, :, :])
slide window(stride)
따라서 각 channel간의 상호작용에 대한 정보가 명시적(explicitly)으로 담기지 않게됩니다.
이를 명시적으로 담기 위해 각 채널에 대한 정보를 압축한 후 excitation하여 Input tensor에 곱합니다.
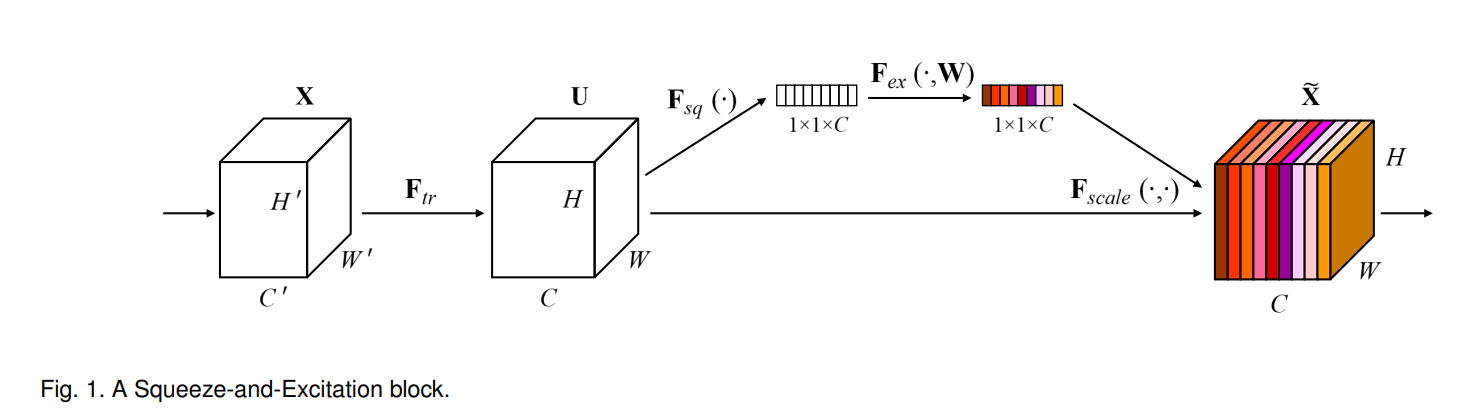
1) 먼저 Squeeze layer를 통해 이전 layer를 거친 feature tensor(H, W, C)를 (1, 1, C)로 압축한 후
2) Excitaiton layer를 통해 압축된 tensor에 projection & activation function을 적용합니다.
3) 해당 결과값(1, 1, C)을 feature tensor(H, W, C)에 곱합니다
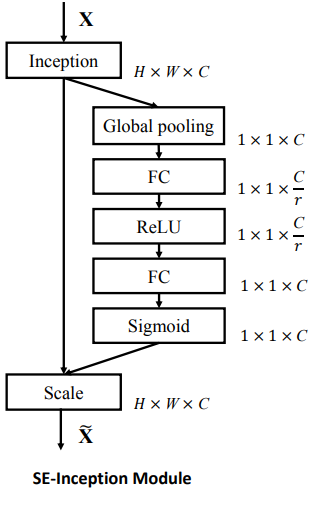
Squeeze¶
# pseudo code
def Squeeze():
inputs:
feature(Tensor[N, C, H, W])
returns:
output(Tensor[N, C, 1, 1])
- Squeeze를 위해 무조건 Average pool 사용?
저자는 maxpool과 average pool을 실험에 사용했지만 Average pool이 더 좋은 성능을 보이는 것을 확인.
(SENet paper TABLE 11 참조)
모델마다 적합한 Squeeze 방법론이 다를 수 있으므로 실험 또는 이론적으로 다른 알고리즘을 적용해보고 특별한 경우가 아닐 경우 average pool 적용
Excitation¶
(1, 1, C) -> (1, 1, C/r) -> (1, 1, C)
# pseudo code
def Excitation():
Linear(C, C/r)
relu()
Linear(C/r, C)
sigmoid()
- Why Excitation(Linear & activation) module 적용?
1) feature의 pooling 값을 그냥 곱할 경우 학습이 적절하게 되지 않을 가능성.
즉 적절한 learnable parameter 필요
2) 각 채널간의 상호작용에 대한 정보 필요
-> fully connected layer and activation function - Why channel reduction(r)?
1) 연산량을 줄이기 위해
2) 일반화를 위해
# psudo code
def SENet():
SE_block = (squeeze & excitation) # SE_block: 각 채널의 상호작용에 대한 정보
return x * SE_block(x)
class Squeeze(nn.Module):
def __init__(self):
super(Squeeze, self).__init__()
self.GAP = nn.AdaptiveAvgPool2d((1, 1))
def forward(self, x):
return self.GAP(x)
class Excitation(nn.Module):
def __init__(self, in_channels, r = 4):
'''
inputs
- in_channels
- r(int): channel reduction ratio
'''
super(Excitation, self).__init__()
self.block = nn.Sequential(
nn.Conv2d(in_channels = in_channels,
out_channels = int(in_channels/r),
kernel_size = (1, 1),
stride = 1),
nn.ReLU(),
nn.Conv2d(in_channels = int(in_channels/r),
out_channels = in_channels,
kernel_size = (1, 1),
stride = 1),
nn.Sigmoid()
)
def forward(self, x):
return self.block(x)
class SENet(nn.Module):
def __init__(self, in_channels, r = 4):
super(SENet, self).__init__()
self.SE_block = nn.Sequential(
Squeeze(),
Excitation(in_channels, r)
)
def forward(self, x):
output = self.SE_block(x)
return x * output
x = torch.randn(1, 128, 7, 7)
model = SENet(in_channels = 128, r = 4)
output = model(x) # output.size() = (1, 128, 7, 7)
output.size()
torch.Size([1, 128, 7, 7])Efficient Net base model(EfficientNetB0)¶
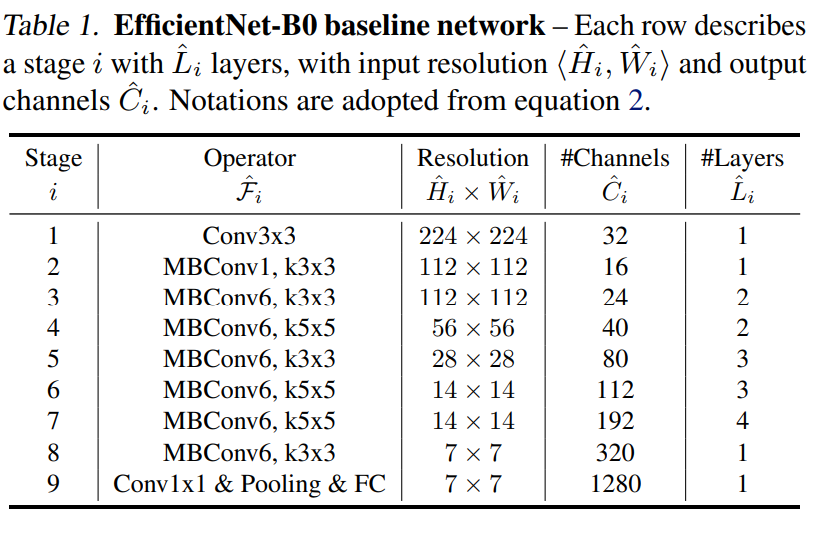
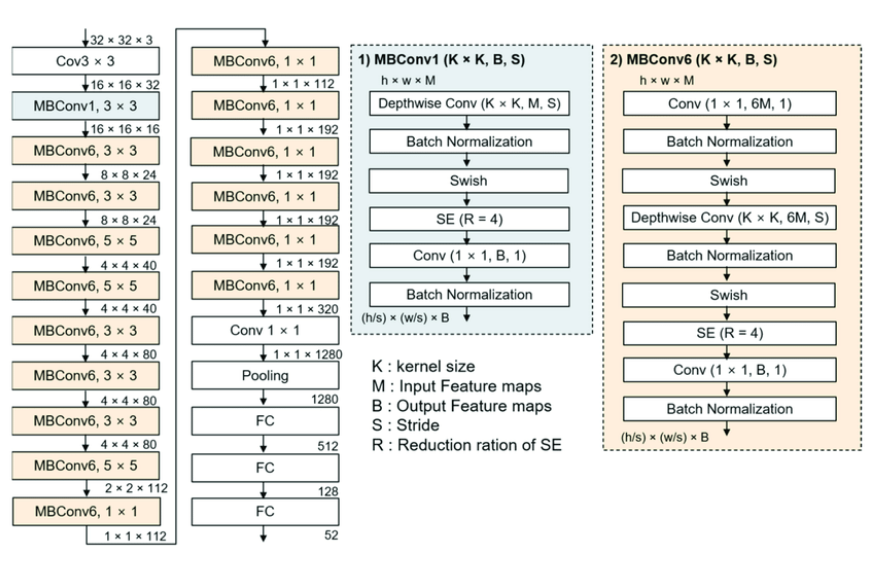
EfficidentNet-B0 basline network¶
위의 모델 architecture에 따라 EfficientNet-B0를 설계하고자 할 때,
- MBConv의 kernel_size가 가변적으로 변하므로 kernel_size를 변수로 설정합니다
- MBConv1과 MBConv6 두 모듈을 나눠서 설계합니다.
- 각 layer의 결과값을 살펴보면 output의 resolution(H*W)을 결정짓는 것은 MBConv 내의 depthwise conv입니다.
- conv layer의 resolution은 크게 kenel_size, stride, padding에 영향을 받습니다.
여기서 layer output을 살펴보면 kerenl_size에 따라 resolution이 결정되지 않습니다.
또한 해당 모델에서 padding은 resolution을 유지하는 역할을 하므로 stride를 통해 image의 resolution을 제어합니다.
cf) w′=1+(w−kernel size+2∗padding)/(2∗stride)
(w: width, w': width after conv, in case of no dilation ) - MBConv block의 경우 #layer가 1 이상이 가능. 따라서,
1) 처음 MBconv layer의 경우 in channel을 이전 MBConv layer의 out channel로 설정
2) 다음 layer에서 kenrel size 유지(stride: 1), in channel = out channel -
# pseudo code class EfficientNetB0(nn.Module): def __init__(self): super(EfficientNetB0, self).__init__() self.stage_1 = conv3x3(stride:1, in_channels = 3, out_channels = 32) self.stage_2 = MBConv1_3x3(stride:2, in_channels = 32, out_channels = 16) self.stage_3 = [MBConv6_3x3(stride:1, in_channels = 16, out_channels = 24), MBConv6_3x3(stride:1, in_channels = 24, out_channels = 24] self.stage_4 = [MBConv6_5x5(stride:2, in_channels = 24, out_channels = 40), MBConv6_5x5(stride:1, in_channels = 40, out_channels = 40] self.stage_5 = [MBConv6_3x3(stride:2, in_channels = 40, out_channels = 80, MBConv6_3x3(stride:1, in_channels = 80, out_channels = 80), MBConv6_3x3(stride:1, in_channels = 80, out_channels = 80)] self.stage_6 = [ MBConv6_5x5(stride:2, in_channels = 80, out_channels = 112), MBConv6_5x5(stride:1, in_channels = 112, out_channels = 112), MBConv6_5x5(stride:1, in_channels = 112, out_channels = 112)] ... self.stage_9 = [ conv1x1, pool, flatten, fc ] def forward(self, x): for stage: x = self.stage(x) return x
class Swish(nn.Module): # search torch.nn.SiLU()
def __init__(self):
super(Swish, self).__init__()
self.sigmoid = nn.Sigmoid()
def forward(self, x):
return x * self.sigmoid(x)
class MBConv1(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride, r = 4):
'''
inputs:
- in_channels(int)
- out_channels(int)
- kernel_size(int): 3: will get padding 1, 5: will get padding 5 in depth wise conv
- stride(int): 1: will retrun same resolution(H*W), 2: will return resolution/4 (H/2 * W/2)
- r(int): channel reduction ratio of SENet
returns:
- MBConv1
'''
super(MBConv1, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
self.stride = stride
self.block = nn.Sequential(
DepthWiseConv(in_channels = in_channels,
kernel_size = kernel_size,
stride = stride),
nn.BatchNorm2d(num_features = in_channels),
Swish(),
SENet(in_channels = in_channels, r = 4),
nn.Conv2d(in_channels = in_channels,
out_channels = out_channels,
kernel_size = (1, 1),
stride = 1),
nn.BatchNorm2d(num_features = out_channels)
)
def forward(self, x):
'''
input:
- x(Tensor[N, in_C, H, W])
return:
- x(Tensor[N, out_C, H', W']): stride 1: H', W' = H, W | stride 2: H', W' = H/2, W/2
'''
# inverted residual block
if self.in_channels == self.out_channels and self.stride == 1:
identity = x
x = self.block(x)
x += identity
else:
x = self.block(x)
return x
class MBConv6(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride, r = 4):
'''
inputs:
- in_channels(int)
- out_channels(int)
- kernel_size(int): 3: will get padding 1, 5: will get padding 5 in depth wise conv
- stride(int): 1: will retrun same resolution(H*W), 2: will return half resolution(H/2 * W/2)
- r(int): channel reduction ratio of SENet
returns:
- MBConv6 (6 means channel expansion)
'''
super(MBConv6, self).__init__()
self.in_channels = in_channels
self.out_channels = out_channels
self.stride = stride
self.block = nn.Sequential(
nn.Conv2d(in_channels = in_channels,
out_channels = 6*in_channels,
kernel_size = (1, 1),
stride = 1),
nn.BatchNorm2d(num_features = 6*in_channels),
Swish(),
DepthWiseConv(in_channels = 6*in_channels,
kernel_size = kernel_size,
stride = stride),
nn.BatchNorm2d(num_features = 6*in_channels),
Swish(),
SENet(in_channels = 6*in_channels, r = 4),
nn.Conv2d(in_channels = 6*in_channels,
out_channels = out_channels,
kernel_size = (1, 1),
stride = 1),
nn.BatchNorm2d(num_features = out_channels)
)
def forward(self, x):
'''
input:
- x(Tensor[N, in_C, H, W])
return:
- x(Tensor[N, out_C, H', W']): stride 1: H', W' = H, W | stride 2: H', W' = H/2, W/2
'''
# inverted residual block
if self.in_channels == self.out_channels and self.stride == 1:
identity = x
x = self.block(x)
x += identity
else:
x = self.block(x)
return x
class EfficientNet(nn.Module):
def __init__(self, img_channels, num_classes):
super(EfficientNet, self).__init__()
self.stage_1 = nn.Conv2d(in_channels = img_channels,
out_channels = 32,
kernel_size = (3, 3),
stride = 1,
padding = 1)
self.stage_2 = MBConv1(in_channels = 32,
out_channels = 16,
kernel_size = 3,
stride = 2)
self.stage_3 = [MBConv6(in_channels = 16,
out_channels = 24,
kernel_size = 3,
stride = 1),
MBConv6(in_channels = 24,
out_channels = 24,
kernel_size = 3,
stride = 1)]
self.stage_3 = nn.Sequential(*self.stage_3)
self.stage_4 = [MBConv6(in_channels = 24,
out_channels = 40,
kernel_size = 5,
stride = 2),
MBConv6(in_channels = 40,
out_channels = 40,
kernel_size = 5,
stride = 1)]
self.stage_4 = nn.Sequential(*self.stage_4)
self.stage_5 = [MBConv6(in_channels = 40,
out_channels = 80,
kernel_size = 3,
stride = 2),
MBConv6(in_channels = 80,
out_channels = 80,
kernel_size = 3,
stride = 1),
MBConv6(in_channels = 80,
out_channels = 80,
kernel_size = 3,
stride = 1)]
self.stage_5 = nn.Sequential(*self.stage_5)
self.stage_6 = [MBConv6(in_channels = 80,
out_channels = 112,
kernel_size = 5,
stride = 2),
MBConv6(in_channels = 112,
out_channels = 112,
kernel_size = 5,
stride = 1),
MBConv6(in_channels = 112,
out_channels = 112,
kernel_size = 5,
stride = 1)]
self.stage_6 = nn.Sequential(*self.stage_6)
self.stage_7 = [MBConv6(in_channels = 112,
out_channels = 192,
kernel_size = 5,
stride = 1),
MBConv6(in_channels = 192,
out_channels = 192,
kernel_size = 5,
stride = 1),
MBConv6(in_channels = 192,
out_channels = 192,
kernel_size = 5,
stride = 1),
MBConv6(in_channels = 192,
out_channels = 192,
kernel_size = 5,
stride = 1),
MBConv6(in_channels = 192,
out_channels = 192,
kernel_size = 5,
stride = 1)]
self.stage_7 = nn.Sequential(*self.stage_7)
self.stage_8 = MBConv6(in_channels = 192,
out_channels = 320,
kernel_size = 3,
stride = 2)
self.stage_9 = nn.Sequential(
nn.Conv2d(in_channels = 320,
out_channels = 1280,
kernel_size = (1, 1),
stride = 1),
nn.AdaptiveMaxPool2d(1),
nn.Flatten(),
nn.Linear(in_features = 1280,
out_features = num_classes)
)
def forward(self, x):
x = self.stage_1(x)
print(x.size())
x = self.stage_2(x)
print(x.size())
x = self.stage_3(x)
print(x.size())
x = self.stage_4(x)
print(x.size())
x = self.stage_5(x)
print(x.size())
x = self.stage_6(x)
print(x.size())
x = self.stage_7(x)
print(x.size())
x = self.stage_8(x)
print(x.size())
x = self.stage_9(x)
print(x.size())
return x
model = EfficientNet(img_channels = 3, num_classes = 10)
x = torch.randn(1, 3, 224, 224)
model(x)
torch.Size([1, 32, 224, 224])
torch.Size([1, 16, 112, 112])
torch.Size([1, 24, 112, 112])
torch.Size([1, 40, 56, 56])
torch.Size([1, 80, 28, 28])
torch.Size([1, 112, 14, 14])
torch.Size([1, 192, 14, 14])
torch.Size([1, 320, 7, 7])
torch.Size([1, 10])
tensor([[ 0.0753, -0.6387, -0.1692, -1.2592, 0.0776, -0.8759, -0.8111, -2.0430,
-0.6446, -0.3166]], grad_fn=<AddmmBackward0>)Compound tune¶
We will compound tune
1) αϕ(depth): each of stage layers depth
2) βϕ(width): num_channels
3) γϕ(resolution): image resolution (height * width)
s.t) αβ2γ2 ≃ 2 (α>=1, β>=1, γ>=1)
step:
1) fix ϕ=1. tune α, β, γ
2) fix α, β, γ. tune ϕ
# skip step 1 (I use alpha, beta, gamma written in paper)
import numpy as np
import math
alpha = 1.2
beta = 1.1
gamma = 1.15
phi = [0, 0.5, 1, 2, 3, 4, 5, 6]
base_depths = np.array([1, 2, 2, 3, 3, 4, 1]) # exclude stage_1, stage_9
base_widths = np.array([32, 16, 24, 40, 80, 112, 192, 320, 1280])
depth_tune = {}
width_tune = {}
resolution = {}
for i in range(len(phi)):
resolution[i] = int(math.ceil(224*(gamma**phi[i])))
depth_tune[i] = np.array(np.ceil(base_depths * (alpha**(phi[i]))), dtype = np.int32)
width_tune[i] = np.array(np.ceil(base_widths * (beta**(phi[i]))), dtype = np.int32)
resolution
{0: 224, 1: 241, 2: 258, 3: 297, 4: 341, 5: 392, 6: 451, 7: 519}depth_tune
{0: array([1, 2, 2, 3, 3, 4, 1]),
1: array([2, 3, 3, 4, 4, 5, 2]),
2: array([2, 3, 3, 4, 4, 5, 2]),
3: array([2, 3, 3, 5, 5, 6, 2]),
4: array([2, 4, 4, 6, 6, 7, 2]),
5: array([3, 5, 5, 7, 7, 9, 3]),
6: array([ 3, 5, 5, 8, 8, 10, 3]),
7: array([ 3, 6, 6, 9, 9, 12, 3])}width_tune
{0: array([ 32, 16, 24, 40, 80, 112, 192, 320, 1280]),
1: array([ 34, 17, 26, 42, 84, 118, 202, 336, 1343]),
2: array([ 36, 18, 27, 44, 88, 124, 212, 352, 1408]),
3: array([ 39, 20, 30, 49, 97, 136, 233, 388, 1549]),
4: array([ 43, 22, 32, 54, 107, 150, 256, 426, 1704]),
5: array([ 47, 24, 36, 59, 118, 164, 282, 469, 1875]),
6: array([ 52, 26, 39, 65, 129, 181, 310, 516, 2062]),
7: array([ 57, 29, 43, 71, 142, 199, 341, 567, 2268])}class EfficientNet(nn.Module):
def __init__(self, img_channels, num_classes, width, depth):
'''
inputs:
- img_channels(int)
- num_classes(int)
- width(list): len(width) = 9. It contains each out channels of stage blocks
- depth(list): len(depth) = 7. It contains each number of depth in MBConv blocks
returns:
- EfficientNet
'''
super(EfficientNet, self).__init__()
self.stage_1 = nn.Conv2d(in_channels = img_channels,
out_channels = width[0],
kernel_size = (3, 3),
stride = 1,
padding = 1)
self.stage_2 = [MBConv1(in_channels = width[0],
out_channels = width[1],
kernel_size = 3,
stride = 2)]
for _ in range(depth[0].item() - 1):
self.stage_2.append(MBConv1(in_channels = width[1],
out_channels = width[1],
kernel_size = 3,
stride = 1))
self.stage_2 = nn.Sequential(*self.stage_2)
self.stage_3 = [MBConv6(in_channels = width[1],
out_channels = width[2],
kernel_size = 3,
stride = 1)]
for _ in range(depth[1].item() - 1):
self.stage_3.append(MBConv6(in_channels = width[2],
out_channels = width[2],
kernel_size = 3,
stride = 1))
self.stage_3 = nn.Sequential(*self.stage_3)
self.stage_4 = [MBConv6(in_channels = width[2],
out_channels = width[3],
kernel_size = 5,
stride = 2)]
for _ in range(depth[2].item() - 1):
self.stage_4.append(MBConv6(in_channels = width[3],
out_channels = width[3],
kernel_size = 5,
stride = 1))
self.stage_4 = nn.Sequential(*self.stage_4)
self.stage_5 = [MBConv6(in_channels = width[3],
out_channels = width[4],
kernel_size = 3,
stride = 2)]
for _ in range(depth[3].item() - 1):
self.stage_5.append(MBConv6(in_channels = width[4],
out_channels = width[4],
kernel_size = 3,
stride = 1))
self.stage_5 = nn.Sequential(*self.stage_5)
self.stage_6 = [MBConv6(in_channels = width[4],
out_channels = width[5],
kernel_size = 5,
stride = 2)]
for _ in range(depth[4].item() - 1):
self.stage_6.append(MBConv6(in_channels = width[5],
out_channels = width[5],
kernel_size = 5,
stride = 1))
self.stage_6 = nn.Sequential(*self.stage_6)
self.stage_7 = [MBConv6(in_channels = width[5],
out_channels = width[6],
kernel_size = 5,
stride = 1)]
for _ in range(depth[5].item() - 1):
self.stage_7.append(MBConv6(in_channels = width[6],
out_channels = width[6],
kernel_size = 5,
stride = 1))
self.stage_7 = nn.Sequential(*self.stage_7)
self.stage_8 = [MBConv6(in_channels = width[6],
out_channels = width[7],
kernel_size = 3,
stride = 2)]
for _ in range(depth[6].item() - 1):
self.stage_8.append(MBConv6(in_channels = width[7],
out_channels = width[7],
kernel_size = 3,
stride = 1))
self.stage_8 = nn.Sequential(*self.stage_8)
self.stage_9 = nn.Sequential(
nn.Conv2d(in_channels = width[7],
out_channels = width[8],
kernel_size = (1, 1),
stride = 1),
nn.AdaptiveMaxPool2d(1),
nn.Flatten(),
nn.Linear(in_features = width[8],
out_features = num_classes)
)
def forward(self, x):
x = self.stage_1(x)
print(x.size())
x = self.stage_2(x)
print(x.size())
x = self.stage_3(x)
print(x.size())
x = self.stage_4(x)
print(x.size())
x = self.stage_5(x)
print(x.size())
x = self.stage_6(x)
print(x.size())
x = self.stage_7(x)
print(x.size())
x = self.stage_8(x)
print(x.size())
x = self.stage_9(x)
print(x.size())
return x
version = 7
my_effnet_b7 = EfficientNet(img_channels = 3,
num_classes= 10,
width = width_tune[version],
depth = depth_tune[version])
w, h = resolution[version], resolution[version]
x = torch.randn(1, 3, w, h)
with torch.no_grad():
out = my_effnet_b7(x)
# official PyTorch Efficient Net
from torchvision.models import efficientnet
b7 = efficientnet.efficientnet_b7(False, False)
'딥러닝 > 딥러닝 모델' 카테고리의 다른 글
| PyTorch로 Transformer 구현하기 (0) | 2022.12.07 |
|---|---|
| PyTorch로 ResNet 구현하기 (0) | 2022.12.07 |
| PyTorch로 GoogLeNet 구현하기 (0) | 2022.12.07 |
| PyTorch로 VGG network 구현하기 (0) | 2022.12.07 |
| PyTorch로 딥러닝 모델 구현하는 방법(LeNet) (0) | 2022.12.07 |